{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Related Posts
การออกแบบและพัฒนาเครื่องแยกถุงจากพาเลทอัตโนมัติ
Design and development machine separate bag from auto pallets
อาจารย์ที่ปรึกษาโครงงาน ผู้ช่วยศาสตราจารย์ ดร.กิตติพงษ์ เยาวาจา
https://www.youtube.com/watch?v=Kj2RSUDVHDQ

นางสาว ชลธิชา จำสูญ 5930301131

นาย ธนวัต บุญเนื่อง 5930301263

นาย ยุทธการ อักษรดี 5930301522

นาย ธนภูมิ เสนศรี 5930301255

Design and development machine separate bag from auto pallets This experiment
we used a bag which measures 15 x 20 cm and weighs 500 grams. The bag is placed on an
adjustable stand and is pulled into the designed entrance by using a roller connected to a
12-volt DC motor installed on a spring arm to increase the pressure on the bag and pulled
up on the belt. This belt is able to move forward and backward by installing lead screws to
increase suction efficiency, which is controlled by an Arduino board connected to a 12-volt
motor. From the experiment determined lead screw length, delay duration And adjust the
position of the stand of the powder bag The results showed that The powder bag can be
sucked in. But there may be discrepancies between the work pieces From the bag
placement process The bags should be placed at the same level as the rolling conveyor.
Because if the bag is not parallel to the roller, it will cause damage to the bag while sucking
the bag.
สารบัญ
การออกแบบและพัฒนาเครื่องแยกถุงจากพาเลทอัตโนมัติ
Design and development machine separate bag from auto pallets
โดย
นางสาว ชลธิชา จำสูญ 5930301131
นาย ธนภูมิ เสนศรี 5930301255
นาย ธนวัต บุญเนื่อง 5930301263
นาย ยุทธการ อักษรดี 5930301522
โดย
โครงงานนี้เป็นส่วนหนึ่งของการศึกษาตามหลักสูตรปริญญาวิศวกรรมศาสตร์บัณฑิต
ภาควิชาวิศวกรรมเครื่องกล คณะวิศวกรรมศาสตร์ศรีราชา มหาวิทยาลัยเกษตรศาสตร์
ปีการศึกษา 2562
การออกแบบและพัฒนาเครื่องแยกถุงจากพาเลทอัตโนมัติ
Design and development machine separate bag from auto pallets
โดย
นางสาว ชลธิชา จำสูญ 5930301131
นาย ธนภูมิ เสนศรี 5930301255
นาย ธนวัต บุญเนื่อง 5930301263
นาย ยุทธการ อักษรดี 5930301522
โดย
โครงงานนี้เป็นส่วนหนึ่งของการศึกษาตามหลักสูตรปริญญาวิศวกรรมศาสตร์บัณฑิต
ภาควิชาวิศวกรรมเครื่องกล คณะวิศวกรรมศาสตร์ศรีราชา มหาวิทยาลัยเกษตรศาสตร์
ปีการศึกษา 2562
ใบรับรองโครงานวิศวกรรม
สาขาวิศวกรรมเครื่องกลและการออกแบบ
ชื่อโครงงาน การออกแบบสร้างและพัฒนาเครื่องแยกถุงจากพาเลทอัตโนมัติ
โดย นางสาว ชลธิชา จำสูญ 5930301131
นาย ธนภูมิ เสนศรี 5930301255
นาย ธนวัต บุญเนื่อง 5930301263
นาย ยุทธการ อักษรดี 5930301522
ชื่อปริญญา วิศวกรรมศาสตร์บัณฑิต
สาขาวิชา วิศวกรรมเครื่องกลและการออกแบบ
ปีการศึกษา 2562
อาจารย์ที่ปรึกษา อาจารย์ ดร. กิตติพงษ์ เยาวาจา
คณะวิศวกรรมศาสตร์ศรีราชา มหาวิทยาลัยเกษตรศาตรย์ อนุมัติให้โครงงานนี้เป็นส่วนหนึ่งของการศึกษาตาม หลักสูตรปริญญาวิศวกรรมศาสตร์บัณฑิต
………………………………………………… อาจารย์ที่ปรึกษา
(อาจารย์ ดร.กิตติพงษ์ เยาวาจา)
ชื่อโครงงาน การออกแบบสร้างและพัฒนาเครื่องแยกถุงจากพาเลทอัตโนมัติ
โดย นางสาว ชลธิชา จำสูญ 5930301131
นาย ธนภูมิ เสนศรี 5930301255
นาย ธนวัต บุญเนื่อง 5930301263
นาย ยุทธการ อักษรดี 5930301522
ชื่อปริญญา วิศวกรรมศาสตร์บัณฑิต
สาขาวิชา วิศวกรรมเครื่องกลและการออกแบบ
ปีการศึกษา 2562
อาจารย์ที่ปรึกษา อาจารย์ ดร. กิตติพงษ์ เยาวาจา
บทคัดย่อ
การออกแบบสร้างและพัฒนาเครื่องแยกถุงจากพาเลทอัตโนมัติโดยในการทดลองและออกแบบครั้งนี้ จะใช้ถุงแป้งข้าวจ้าว ซึ่งมีขนาด 15 x 20 เซนติเมตร มีน้ำหนัก 500 กรัม ถุงแป้งจะวางบนแท่นวางซึ่งปรับระดับได้ แล้วจะถูกดูดเข้ามาที่ปากทางเข้าของตัวเครื่องที่ได้ออกแบบไว้ โดยใช้ลูกกลิ้งลำเลียงซึ่งติดกับมอเตอร์กระแสตรงขนาด 12 โวลต์ ติดตั้งไว้กับแขนสปริงเพื่อเพิ่มแรงกดให้ถุงแป้ง และมีสายพานลำเลียงเป็นตัวรองรับ ซึ่งสายพานลำเลียงสามารถเคลื่อนตัวไปข้างหน้าและถอยหลังได้ด้วยเพื่อช่วยเพิ่มประสิทธิภาพในการดูดถุงแป้งข้าวจ้าวซึ่งทำงานโดยลีดสกรู และมีการออกแบบระบบควบคุมด้วยบอร์ด Arduino ผ่านทางมอเตอร์ โดยป้อนกระแสไฟ 12 โวลต์ ในการทดลองจะทำการวางถุงในระดับที่ต่างกันเพื่อทดสอบว่า ที่ความสูงจากระดับพื้นเท่าไร ถุงถึงจะจะดูดเข้าไปได้ จากการทดลองกำหนดระยะลีดสกรูระยะเวลาดีเลย์ และปรับตำแหน่งแท่นวางของถุงแป้ง ผลการทดลองพบว่า ถุงแป้งสามารถดูดเข้าไปได้ แต่อาจมีความคลาดเคลื่อนของชิ้นงาน จากขั้นตอนการวางถุง ควรจะวางถุงให้อยู่ในระดับเดียวกับลูกลิ้งลำเลียง เพราะถ้าวางถุงไม่ขนานกับลูกกลิ้งจะทำให้ขณะดูดถุงจะเกิดความเสียหายต่อถุงแป้ง
Title Design and development machine separate bag from auto pallets
Name Ms. Chonthicha Jamsoon 5930301131
Mr. Tanapoom Sensri 5930301255
Mr. Tanawat Boonnerng 5930301263
Mr. Yuttakarn Auksorndee 5930301522
Degree Award Bachelor of Engineering
Study Program Mechanical Engineering
Academic Year 2562
Project Advisor Dr. Kittipong Yaovaja
Abstract
Design and development machine separate bag from auto pallets This experiment we used a bag which measures 15 x 20 cm and weighs 500 grams. The bag is placed on an adjustable stand and is pulled into the designed entrance by using a roller connected to a 12-volt DC motor installed on a spring arm to increase the pressure on the bag and pulled up on the belt. This belt is able to move forward and backward by installing lead screws to increase suction efficiency, which is controlled by an Arduino board connected to a 12-volt motor. From the experiment determined lead screw length, delay duration And adjust the position of the stand of the powder bag The results showed that The powder bag can be sucked in. But there may be discrepancies between the work pieces From the bag placement process The bags should be placed at the same level as the rolling conveyor. Because if the bag is not parallel to the roller, it will cause damage to the bag while sucking the bag.
กิตกรรมประกาศ
โครงงานวิศวกรรมฉบับนี้สำเร็จลุล่วงได้ด้วยดีตามวัตถุประสงค์อันเนื่องมาจากได้รับความร่วมมือและอำนวยความสะดวกเป็นอย่างดีจากอาจารย์และบุคคลต่าง ๆ ที่เกี่ยวข้อง โดยทางคณะผู้จัดทำต้องขอขอบพระคุณบุคคลและกลุ่มบุคคลต่าง ๆ ที่ให้คำปรึกษา แนะนำ และช่วยเหลือเป็นอย่างดีมาตลอดทั้งด้านวิชาการ และการดำเนินโครงงาน ดังนี้
อาจารย์ กิตติพงษ์ เยาวาจา ที่ปรึกษาโครงงาน ให้คำแนะนำทั้งในด้านวิชาการ การดำเนินงาน อีกทั้งยังให้คำปรึกษาจนสามารถผ่านอุปสรรคต่าง ๆ จนลุล่วงมาได้ด้วยดี นอกจากนี้ยังให้คำชี้แนะ และมอบโอกาสดี ๆ ให้เสมอ
บุคคลากรประจำภาควิชาวิศวกรรมเครื่องกล และบุคลากรประจำคณะวิศวกรรมศาสตร์ศรีราชา มหาวิทยาลัยเกษตศาสตร์ วิทยาเขตศรีราชา ที่ได้อำนวยความสะดวกในการทำโครงงานทั้งทางด้านเอกสาร ข้อมูล และอุปกรณ์เครื่องมือต่าง ๆ ที่ใช้ในโครงงานวิศวกรรม
สุดท้ายนี้ คุณงามความดีอันพึงมีจากโครงงานวิศวกรรมฉบับนี้ ทางคณะผู้จัดทำขอมอบแด่บิดา มารดา อันเป็นที่เคารพยิ่ง และคณาจารย์ผู้ประสาทวิชาความรู้ ตลอดจนทุก ๆ ท่านที่ให้ กำลังใจช่วยเหลือจนกระทั่งวิทยานิพน์ฉบับนี้สำเร็จลุล่วงด้วยดี
นางสาว ชลธิชา จำสูญ
นาย ธนภูมิ เสนศรี นาย ธนวัต บุญเนื่อง นาย ยุทธการ อักษรดี
สารบัญ
หน้า
สารบัญ (1)
สารบัญตาราง (2)
สารบัญภาพ (3)
1.4 ขั้นตอนและวิธีดำเนินงาน. 2
1.5 ประโยชน์ที่คาดว่าจะได้รับ. 3
2.2 การหากําลังขับสายพานลําเลียง 5
2. 3 การหาค่าแรงดึงสายพาน (Tension Calculation) 6
2.4. การหาขนาดของพูเล่ย์สายพานลําเลียง 7
2.5 ความเค้นที่เกิดขึ้นในเพลาพูเล่ย์. 8
2.7 มอเตอร์ไฟฟ้ากระแสสลับ 3 เฟส. 13
2.8 แรงเสียดทาน (Frictional force) 15
2.11 ทฤษฎีด้านแบริ่งลูกปืน. 32
3.2 ขั้นตอนและการดำเนินงานสร้าแบบจำลองเครื่องดูดถุงและลำเลียงในโรงงานอุตสาหกรรม. 47
3.3 แผนผังการสั่งงานลีดสกรู (lead screw) 54
4.1 วัตถุประสงค์ของการทดลอง 56
4.2 ขั้นตอนการทำงานของกระบวนการ. 56
การออกแบบอุปกรณ์ที่ใช้ในการทดลอง 64
โปรแกรมควบคุมการทำงานของ ลีดสกรู(lead screw) 69
สารบัญภาพ
รูปที่ หน้า
รูปที่ 2-2 ขดลวดสนามแม่เหล็ก. 11
รูปที่ 2-4 โครงสร้าอย่างง่ายของสเต็ปเปอร์มอเตอร์ชนิดไฮบริด. 19
รูปที่ 2-5 ลักษณะการพันขดลวดสเต็ปเปอร์มอเตอร์ยูนิโพล่าร์. 19
รูปที่ 2-6 ลักษณะการพันขดลวดสเต็ปเปอร์มอเตอร์ยูนิโพล่าร์. 20
รูปที่ 2-7 ข้อมูลเบื้องต้นที่ควรทราบของสเต็ปเปอร์มอเตอร์มาตรฐาน NEMA23. 21
รูปที่ 2-8 ข้อมูลเบื้องต้นที่ควรทราบของสเต็ปเปอร์มอเตอร์มาตรฐานทรงกระป๋องซ้อน. 22
รูปที่ 2-9 ภาพจำลองการหมุนของสเต็ปเปอร์มอเตอร์แบบยูนิโพล่าร์. 25
รูปที่ 2-10 วงจรขับสเต็ปเปอร์มอเตอร์แบบฟูลสเต็ป 1 เฟส. 26
รูปที่ 2-11 แสดงลักษณะ chordal action. 29
รูปที่ 2-12 แบริ่งเม็ดทรงกระบอก. 33
รูปที่ 2-13 แบริ่งเม็ดโค้งกันรุน. 34
รูปที่ 2-14 แบริ่งเม็ดกลมปรับแนวได้เอง 34
รูปที่ 2-15 แบริ่งเม็ดกลมสัมผัสเชิงมุมสี่จุด. 35
รูปที่ 2-16 แบริ่งเม็ดกลมกันรุนทิศทางเดียว. 36
รูปที่ 2-17 แบริ่งเม็ดกลมสัมผัสเชิงมุมสองแถว. 36
รูปที่ 2-19 แบริ่งประกบคู่. 37
รูปที่ 2-21 แบริ่งเม็ดกลมสัมผัสเชิงมุม. 39
รูปที่ 2-22 แบริ่งเม็ดเข็ม. 39
รูปที่ 2-23 แบริ่งแม็กนีโต. 40
รูปที่ 2-24 แบริ่งเม็ดกลมล่องลึกแถวเดียว. 40
ตารางที่ 2. 1 ข้อมูลเบื้องต้นที่ควรทราบของสเต็ปเปอร์มอเตอร์มาตรฐาน NEMA 21
ตารางที่ 2. 2 แสดงรูปแบบการกระตุ้นขดลวดของสเต็ปเปอร์มอเตอร์แบบเวฟหรือฟูลสเต็ป 1 เฟส 23
ตารางที่ 2. 3 รูปแบบการกระตุ้นขดลวดของสเต็ปเปอร์มอเตอร์แบบเวฟหรือฟูลสเต็ป 2 เฟส 24
ตารางที่ 2. 4 แสดงรูปแบบการกระตุ้นขดลวดของสเต็ปเปอร์มอเตอร์แบบครึ่งสเต็ปหรือฮาล์ฟสเต็ป 24
ตารางที่
4. 1 แสดงผลการทดลองโดยใช้ถุงจำนวน 1 ถุง
ที่ระดับต่าง ๆกัน 57ตารางที่
4. 2 แสดงผลการทดลองโดยใช้ถุง จำนวน 2 ถุง
ที่ระดับต่าง ๆกัน 58
บทที่ 1
บทนำ
1.1 ที่มาของโครงงาน
ปัจจุบันเทคโนโลยีการผลิตในโรงงานอุตสาหกรรม มีการพัฒนาไปอย่างรวดเร็วและมีความต้องการที่จะลดต้นทุนและเพิ่มผลผลิต ทุกกระบวนการมีความสำคัญ รวมไปถึงกระบวนการขนย้ายที่มีความสำคัญต่อกระบวนการผลิต เริ่มต้นตั้งแต่การนำวัตถุดิบมายังโรงงานส่งผ่านไปยังกระบวนการผลิตจนได้เป็นผลิตภัณฑ์ ซึ่งจะต้องมีการเคลื่อนที่ทั้งสิ้น หลักการสำคัญก็คือทำอย่างไรจึงจะทำให้การเคลื่อนที่หรือการขนย้ายเป็นไปอย่างมีประสิทธิภาพ ซึ่งเป็นสิ่งที่จะต้องคำนึงถึงตลอดเวลาเพราะปัญหาด้านการขนย้ายวัสดุมักจะเกิดขึ้นในโรงงานอยู่เสมอ การจัดการขนย้ายวัสดุไม่ได้มุ่งหวังที่จะกำจัดปัญหาการขนย้ายให้หมดไปแต่เป็นการพยายามลดปัญหาให้น้อยลง กล่าวคือ ทำอย่างไรจึงจะทำให้การขนถ่ายเป็นไปอย่างสะดวก รวดเร็วปลอดภัย ดังนั้น จึงได้คิดค้นแยกถุงจากพาเลทอัตโนมัติมาใช้ในกระบวนการเคลื่อนย้ายสินค้า เพื่อจะทำให้ขบวนการขนย้ายมีประสิทธิภาพสูงสุดและให้ได้งานที่มีคุณภาพป้องกันความเสียหายให้สินค้าเป็นการประหยัดต้นทุนและค่าใช้จ่ายต่าง ๆ โดยการใช้เครื่องแยกถุงจากพาเลทอัตโนมัติ มาใช้ในโรงงานอุตสาหกรรมสามารถลดงานของคนงาน ทำให้ช่วยลดค่าใช้จ่ายในการผลิตได้เนื่องจากปัจจุบันการควบคุมการทำงานของเครื่องจักร หรือ สายการผลิตที่เป็นลำดับขั้นตอนโดยมีการทำงานเป็นวัฎจักรหรือวนซ้ำไปมาเหมือนเดิมอย่างแม่นยำมีความต้องการเป็นอย่างมากทั้งในโรงงานอุตสาหกรรมขนาดเล็กจนถึงอุตสาหกรรมโรงงานขนาดใหญ่ ถ้าจะใช้แรงงานคนจะไม่ค่อยเหมาะสมเท่าไรเพราะบางทีอุปกรณ์ที่ใช้ในการดึงอาจส่งผลให้สินค้าเกิดความเสียหาย คนต้องใช้แรงในการดึงจำนวนมากซึ่งจะส่งผลให้ทำงานได้ไม่สม่ำเสมอและไม่มีประสิทธิภาพเมื่อมีความล้าเพิ่มขึ้น ดังนั้นโรงงานอุตสาหกรรมที่มีกระบวนการขนย้ายสินค้า เครื่องแยกถุงจากพาเลทอัตโนมัติจะเป็นคำตอบที่เหมาะสมในขบวนการขนย้าย เนื่องจากไม่มีความล้าในการทำงานเหมือนแรงงานคน และสามารถทำงานได้สม่ำเสมอ
1.2 วัตถุประสงค์ของโครงงาน
1.2.1 เพื่อศึกษาเรียนรู้การออกแบบคิดค้นตัวโครงสร้าง และทำเป็นภาพ 3 มิติ
1.2.2 เพื่อศึกษาการเขียนโปรแกรมการควบคุมกระบวนการเคลื่อนที่ด้วยลีดสกรู
1.2.3 เพื่อศึกษาทักษะในการสร้างแบบจำลองของตัวเครื่องให้เหมาะสมกับการทำงาน
1.2.4 ได้เครื่องต้นแบบที่สามารถนำไปพัฒนา และผลิตเพื่อใช้งานจริงต่อไป
1.3 ขอบเขตโครงงาน
1.3.1 ออกแบบโครงสร้าง และกำหนดขนาด ทำเป็นภาพ 3 มิติ เพื่อใช้ในการสร้างโมเดล
1.3.2 สามารถควบคุมการทำงานของสายพานร่วมกับลีดสกรู
1.3.3 สร้างแบบจำลองตามโครงสร้างและขนาดที่ได้ออกแบบไว้ และสามารถทำงานได้จริง
1.4 ขั้นตอนและวิธีดำเนินงาน
1.4.1 คิดหัวข้อ และนำเสนอ
1.4.2 ค้นหาข้อมูล และปัญหาที่เกิดในโรงงานขณะการเคลื่อนย้ายสินค้า
1.4.3 ออกแบบการทำงานของตัวเครื่องร่วมกับมอเตอร์ ลีดสกรู และทำเป็นภาพ 3D
1.4.4 ค้นหาข้อมูลการทำงานของลีดสกรู โดยการสั่งงานผ่านบอร์ด Arduino
1.4.5 ศึกษาการเคลื่อนที่ของสินค้าที่ใช้ในการทดลอง โดยมีตัวลูกกลิ้งเป็นตัวช่วยเพิ่มแรง
1.4.6 ทำโครงสร้างของตัวเครื่อง
1.4.7 ลงมือเขียนเขียนโปรแกรมเพื่อสั่งงานลีดสกรู
1.4.8 ทำการเดินสายไฟ ต่อมอเตอร์ และแปลงไฟจากมอเตอร์
1.4.9 ทดลองป้อนชิ้นงานโดยผ่านตัวลูกกลิ้ง และมีตัวสายพานเป็นตัวรองรับ
1.4.10 ทำการเก็บข้อมูลการทำงาน และแก้ไข
1.4.11 ประเมินผล และประสิทธิภาพการทำงานของตัวเครื่อง
1.4.12 นำเสนอโครงงาน
1.5 ประโยชน์ที่คาดว่าจะได้รับ
1.5.1 ได้ศึกษาเกี่ยวกับการออกแบบนวัตกรรม การใช้งานของมอเตอร์ การทำงานของอุปกรณ์อิเล็กทรอนิกส์ต่าง ๆ
1.5.2 เมื่ออกแบบ และจำลองโมเดลแล้ว สามารถนำนวัตกรรมที่คิดค้นขึ้นมาใช้ในภาคโรงงานอุตสาหกรรมได้จริง ๆ
1.5.3 ได้ฝึกทักษะในการทำงานจริง
1.5.4 ใช้เป็นแบบอย่างให้นิสิตและผู้สนใจประยุกต์ใช้ความรู้ในภาคทฤษฎี และนำผลที่ได้เป็นข้อมูลพื้นฐานในการแก้ปัญและปรับปรุงต่อไป
บทที่ 2
ทฤษฎีที่เกี่ยวข้อง
การควบคุมอัตโนมัติทางอุตสาหกรรม และหุ่นยนต์อุตสาหกรรม คือ การผลิตสินค้า และบริการต่างเป็นการนำเอาปัจจัยพื้นฐานในการผลิตต่าง ๆ เช่น คน เงิน เครื่องจักร และอุปกรณ์รวมถึงระบบการจัดการในการนำเอาวัตถุดิบมาแปรรูปเป็นสินค้า และบริการขึ้นเพื่อสนองต่อความต้องการของมนุษย์ในการผลิตสินค้า และบริการวัตถุประสงค์หลักก็คือเพื่อให้ได้สินค้า และบริการที่มีคุณภาพ ปริมารที่ต้องการที่ต้องการนอกจากคุณภาพ และปริมาณผลผลิตที่ได้แล้วสิ่งที่ต้องคำนึงถึงคือปัญหาที่เกิดจากการผลิต และบริการประการหนึ่งคือระบบควบคุมอัตโนมัติ ซึ่งทำหน้าที่ในการควบคุมการทำงานของระบบกระบวนการผลิตเพื่อให้อุปกรณ์ และเครื่องมือเครื่องจักรทำงานตามต้องการ ดังนั้นอาจกล่าวได้ว่าระบบควบคุมอัตโนมัติในโรงงานอุตสาหกรรมเป็นสิ่งที่ควรจะต้องศึกษาเพื่อนำมาประยุกต์ใช้ให้เกิดประโยชน์อย่างสูงสุด
2.1 ระบบสายพานลําเลียง
ระบบสายพานเป็นอุปกรณ์ที่ใช้ในการขนส่งวัสดุแบบต่อเนื่อง ปัจจุบันได้มีการนําเอา สายพานลําเลียงมาใช้ในงานขนถ่ายวัสดุกันอย่างแพร่หลายเช่น โรงงานปูนซีเมนต โรงโมหิน ไซโล พืชผลทางการเกษตร เหมืองแร่ (ที่มา : ปาน มนัส ศิริสมบูรณ, 2534)
2.1.1 สายพาน (Conveyor Belt) ใช้รองรับวัสดุที่ลําเลียงส่วนใหญ่ทำมาจากยางโครงสร้างของสายพานประกอบด้วยยางชั้นบน และยางชั้นล่าง แกนรับแรงทำด้วยผ้าใบ (Fabric) หรือลวด เหล็ก (Steel Cord) นอกจากนี้ยังมียางบางระหว่างชั้นผ้าใบ (Cushion Rubber) ในการออกแบบ
สายพานลําเลียงนั้นจะพิจารณาถึงคุณสมบัติของยางสายพาน ความแข็งแรง ความหนา และความกว้างของสายพาน
2.1.2 ชุดขับ (Drive Unit) โดยทั่วไปจะประกอบด้วยมอเตอร์ไฟฟ้าทดรอบด้วยชุดเกียร์บ็อก (Gearbox) เพื่อให้ได้กําลังขับและความเร็วรอบตามที่ต้องการ
2.1.3 พูเล่ย์ (Pulley) เป็นอุปกรณ์ที่ใช้ขับสายพาน และดึงสายพานให้ตึงทั้งนี้จะขึ้นอยู่กับลักษณะของการติดตั้ง และลักษณะของการใช้งาน
2.1.4 ชุดดึงปรับสายพาน (Take- up unit) ใช้สําหรับปรับสายพานให้ตึงตามความต้องการ
2.1.5 ลูกกลิ้งรองรับสายพาน (Idler)
2.1.6 อ่างรับวัสดุ (Hopper)
2.1.7 อุปกรณ์ทำความสะอาดสายพาน (Belt Cleaner)
2.1.8 โต๊ะสายพาน (Belt Frame)
2.1.9 อุปกรณ์ควบคุมการทำงานของสายพาน (Belt Control System)
2.2 การหากําลังขับสายพานลําเลียง
การหากําลังขับสายพานลําเลียงนั้นสามารถหาได้จากแรงเสียดทานรวมของสายพาน ลําเลียง ซึ่งส่วนมากจะนิยมใช้มาตรฐาน DIN 22101 และ JIS B8805
2.2.1. มาตรฐาน DIN 22101 (ที่มา : Nordell , L.K., 1987
= Cflg[M + /(3.6V)] ± gh /(3.6V) ; N (2.1)
กําลังขับสายพานลําเลียง
P = V/1000 ; kW (2.2)
กําลังขับสายพานลําเลียงที่ได้จากการออกแบบ
= P/η ; kW (2.3)
2. 3 การหาค่าแรงดึงสายพาน (Tension Calculation)
การส่งกําลังขับสายพาน (Power Transmission of Belt) การส่งกําลังขับสายพานจะเกิดขึ้นที่พูเล่ย์ตัวขับ (Drive Pulley) กําลังขับที่ส่งผ่านสายพานทําให้สายพานมีแรงดึง และความเร็ว (V) ถ้าแสดงค่ากําลังขับเป็นกิโลวัตต์ (kW) โดยใชหน่วย นิวตัน, เมตร และวินาที จะได้สมการดังนี้
P = ( – )V/1000 ; kW (2.4)
ความแตกต่างระหว่างแรงดึงด้านตึง (Tight Side Tension) และแรงดึงด้านหย่อน (Slack Side Tension) เป็นแรงดึงที่มีผลในการขับสายพานเรียกว่า แรงดึงยังผล (Effective Tension, TE)
= – ; N (2.5)
จะได้ว่า
P = V/1000 ; kW (2.6)
แรงดึงสูงสุดในสายพานที่ยอมรับได้ จะกําหนดโดยคุณสมบัติของสายพาน แรงดึงสูงสุด จะเกิดที่ด้านตึง (Tight side tension) ขณะที่สายพานเริ่มเคลื่อนที่อย่างนิ่มนวลจากหยุดนิ่งสายพาน จะถูกดึง แรงดึงสายพานจะเพิ่มขึ้นถึง 20 % จากแรงดึงปกติ, (ที่มา: Yokohama Conveyor Belts Technical Information Catalog, 1974)
สายพานลําเลียงที่มีความยาวมาก หรือมีการยกระดับให้สูงมาก แรงดึงด้านตึงก็จะมีค่ามาก เนื่องจากสภาวะที่ไม่เกิดการสลิป /≤ ดังนั้นจึงสามารถเพิ่มประสิทธิภาพการขับสายพาน โดยวิธีดังต่อไปนี้, (ที่มา : Bridge Stone Conveyor Belts Technical Information Catalog, 1990)
– เพิ่มค่าสัมประสิทธิ์ ความเสียดทาน (μ) โดยเคลือบผิวพูเล่ย์ขับด้วยวัสดุที่เพิ่มความเสียด ทาน เช่นยาง หรือเซรามิค
– เพิ่มค่ามุมสัมผัส (Wrap Angle, α) โดยติดตั้งพูเล่ย์กด (Snub Pulley) หรือใช้พูเล่ย์หลายตัว
– เพิ่มแรงดึงสายพานด้านหย่อน (Pre-tension)
2.3.1 แรงดึงสายพานด้านหย่อน (Slack Side Tension, T2 )
จะได้ว่า = /( – 1) ; N (2.7)
2.3.2 แรงดึงสายพานด้านตึง (Tight Side Tension, T1 )
= + ; N (2.8)
2.4. การหาขนาดของพูเล่ย์สายพานลําเลียง
ขนาดเส้นผ่านศูนย์กลางของพูเล่ย์ทั้งตัวขับ และพูเล่ย์ตัวตาม จะพิจารณาจากชนิด และลักษณะของสายพานว่าเป็นสายพานชนิดสายพานผ้าใบ หรือสายพานลวดสลิง
2.4.1 ขนาดของเพลาพูเล่ย์ตัวขับ (Drive Pulley Shaft)
หลังจากที่ได้เลือกขนาดพูเล่ย์แล้วจะใช้แรงดึงสายพาน บวก และน้ำหนักของพูเล่ย์ (qT), เพื่อหาแรงลัพธ์ที่กระทํากับตัวพูเล่ย์ (Cp) หรือ (W) จากนั้นจึงให้หาขนาดโมเมนต์ดัด และโมเมนต์บิด (Torsion moment, ) หรือทอร์ค (Torque, T) จากแรงที่กระทํากับพูเล่ย์เพื่อจะนําไปหาขนาดเพลา พูเล่ย์ตัวขับตามสมการ 2.9–2.12, (ที่มา : Singh,M.P.,1994)
Cp = ; N (2.9)
= ; Nm (2.10)
, T = ;Nm (2.11)
P = กําลังขับ ; kW
n = ความเร็วรอบของพูเล่ย์ตัวขับ; rpm
d = ; mm (2.12)
d = ขนาดของเพลาพูเล่ ; mm
τ = ความเค้นเฉือนของวัสดุที่ใช้ทําเพลา; N/
ตัวประกอบการดัด ขึ้นอยู่กับสภาพการใช้งาน
ตัวประกอบการบิด ขึ้นอยู่กับสภาพการใช้งาน
2.5 ความเค้นที่เกิดขึ้นในเพลาพูเล่ย์
เพลา คือคานที่หมุนได้ ซึ่งเพลาอาจจะรับแรงดึง แรงกด แรงบิด แรงดัด หรือหลายแรงรวมกัน ดังนั้นการคํานวณจึงต้องใช้ความเค้นผสมเข้ามาช่วย แรงเหล่านี้อาจจะมีการเปลี่ยนแปลงขนาดตลอดเวลา ทําให้เพลาเกิดความเสียหายเพราะความล้าได้ เพลาของมูเล่ขับสายพานอยูภายใต้ความเค้นผสมคือ ความเค้นดัดและความเค้นเฉือนที่เกิดจากแรงดึงของสายพาน (ที่มา : Belt Conveyor for Material Second Edition, 1979)
2.5.1 ความเค้นผสมระหว่างความเค้นดัด และความเค้นเฉือน เมื่อเพลาอยู่ภายใต้โมเมนต์ดัด และแรงบิดพร้อมกัน จะทําให้เกิดความเค้นหลักขึ้นในเพลาซึ่งได้แก่ ความเค้นดัดสลับ ความเค้น ดัดเฉลี่ย และความเค้นเฉือนสลับ ความเค้นเฉือนเฉลี่ย
ถ้าหากพิจารณาชิ้นส่วนที่เล็ก ๆ ที่ผิวของวัสดุจะได้รับความเค้นระนาบอันเกิดจากความเค้น ดัดสลับ () และความเค้นดัดเฉลี่ย () ซึ่งจะหาค่าได้จากสมการดังนี้
– ความเค้นดัดสลับสามารถแสดงได้ดังสมการ 2.13
(2.13)
– ความเค้นดัดเฉลี่ยสามารถแสดงได้ดังสมการ 2.14
(2.14)
– ความเค้นเฉือนสลับสามารถแสดงได้ดังสมการ 2.15
(2.15)
– ความเค้นเฉือนเฉลี่ยสามารถแสดงได้ดังสมการ 2.16
(2.16)
2.6 มอเตอร์ไฟฟ้ากระแสตรง
2.6.1 ส่วนประกอบของมอเตอร์ไฟฟ้ากระแสตรง
มอเตอร์ไฟฟ้ากระแสตรงที่ส่วนประกอบที่สาคัญ 2 ส่วนดังนี้
1. ส่วนที่อยู่กับที่หรือที่เรียกว่าสเตเตอร์ (Stator) ประกอบด้วย
– เฟรมหรือโยค (Frame Or Yoke) เป็นโครงภายนอกทำหน้าที่เป็นทางเดินของเส้นแรงแม่เหล็กจากขั้วเหนือไปขั้วใต้ให้ครบวงจร และยึดส่วนประกอบอื่น ๆ ให้แข็งแรง ทำด้วยเหล็กหล่อ หรือเหล็กแผ่นหนาม้วนเป็นรูปทรงกระบอก
( ที่มา :http://www.mut.ac.th/research-detail-54)
ขั้วแม่เหล็ก (Pole) ประกอบด้วย 2 ส่วนคือแกนขั้วแม่เหล็ก และขดลวดส่วนแรกแกนขั้ว (Pole Core) ทำด้วยแผ่นเหล็กเบากั้นด้วยฉนวนประกอบกันเป็นแท่งยึดติดกับเฟรมส่วนปลายที่ทำเป็นรูปโค้งนั้นเพื่อโค้งรับรูปกลมของตัวโรเตอร์เรียกว่าขั้วแม่เหล็ก (Pole Shoes) มีวัตถุประสงค์ให้ขั้วแม่เหล็ก และ
โรเตอร์ใกล้ชิดกันมากที่สุดเพื่อให้เกิดช่องอากาศน้อยที่สุดเพื่อให้เกิดช่องอากาศน้อยที่สุดจะมีผลให้เส้นแรงแม่เหล็กจากขั้วแม่เหล็กจากขั้วแม่เหล็กผ่านไปยังโรเตอร์มากที่สุดแล้วทาให้เกิดแรงบิด หรือกาลังบิดของโรเตอร์มากทำให้มอเตอร์มีกาลังหมุน
(ที่มา : https://sites.google.com/site/moterchanidtang/ )
ส่วนที่สองขดลวดสนามแม่เหล็ก (Field
Coil) จะพันอยู่รอบ ๆแกนขั้วแม่เหล็ก ขดลวดนี้ทำหน้าที่รับกระแสจากภายนอกเพื่อสร้างเส้นแรงแม่เหล็กให้เกิดขึ้น
และเส้นแรงแม่เหล็กนี้จะเกิดการหักล้าง และเสริมกันกับสนามแม่เหล็กของอาเมเจอร์ทำให้เกิดแรงบิดขึ้น
(ที่มา : https://www.brighthubengineering.com/consumer-appliances-electronics/72138-examples-of-electromagnetism-in-todays-technology/)
2. ตัวหมุน (Rotor) ตัวหมุน หรือเรียกว่าโรเตอร์ตัวหมุนนี้ทำให้เกิดกำลังงานมีแกนวางอยู่ตลับลูกปืน (Ball Bearing) ซึ่งประกอบอยู่ในแผ่นปิดหัวท้าย (End Plate) ของมอเตอร์
(ที่มา :https://www.wikiwand.com/th )
ตัวโรเตอร์ประกอบด้วย 4 ส่วนด้วยกัน คือ
1.แกนเพลา (Shaft)
2. แกนเหล็กอาร์มาเจอร์ (Armature Core)
3.คอมมิวเตอร์ (Commutator)
4. ขดลวดอาร์มาเจอร์ (Armature Widing)
5. แปลงถ่าน (Brushes)
1.แกนเพลา (Shaft) เป็นตัวสำหรับยืดคอมมิวเตเตอร์ และยึดแกนเหล็กอาร์มาเจอร์ (Armature Core) ประกอบเป็นตัวโรเตอร์แกนเพลานี้จะวางอยู่บนแบริ่งเพื่อบังคับให้หมุนอยู่ในแนวนิ่งไม่มีการสั่นสะเทือนได้
2. แกนเหล็กอาร์มาเจอร์ (Armature Core) ทำด้วยแผ่นเหล็กบางอาบฉนวน (Laminated Sheet Steel) เป็นที่สำหรับพันขดลวดอาร์มาเจอร์ซึ่งสร้างแรงบิด (Torque)
3. คอมมิวเตเตอร์(Commutator) ทำด้วยทองแดงออกแบบเป็นซี่แต่ละซี่มีฉนวนไมก้า (mica) คั่นระหว่างซี่ของคอมมิวเตเตอร์ ส่วนหัวซี่ของคอมมิวเตเตอร์จะมีร่องสำหรับใส่ปลายสายของขดลวดอาร์มาเจอร์ ตัวคอมมิวเตเตอร์นี้อัดแน่นติดกับแกนเพลาเป็นรูปกลมทรงกระบอกมีหน้าที่สัมผัสกับแปรงถ่าน (Carbon Brushes) เพื่อรับกระแสจากสายป้อนเข้าไปยังขดลวดอาร์มาเจอร์เพื่อสร้างเส้นแรงแม่เหล็กอีกส่วนหนึ่งให้เกิดการหักล้างและเสริมกันกับเส้นแรงแม่เหล็กอีกส่วนซึ่งเกิดจากขดลวดขั้วแม่เหล็กดังกล่าวมาแล้วเรียกว่าปฏิกิริยามอเตอร์(Motor action)
4. ขดลวดอาร์มาเจอร์ (Armature Winding) เป็นขดลวดพันอยู่ในร่องสลอท (Slot) ของแกนอาร์มาเจอร์ ขนาดของลวดจะเล็กหรือใหญ่และจำนวนรอบจะมากหรือน้อยนั้นขึ้นอยู่กับการออกแบบของตัวโรเตอร์
ชนิดนั้น ๆ เพื่อที่จะให้เหมาะสมกับงานต่าง ๆ ที่ต้องการ ควรศึกษาต่อไปในเรื่องการพันอาร์มาเจอร์ (Armature Winding) ในโอกาสต่อไป
5. แปรงถ่าน (Brushes) ทำด้วยคาร์บอนมีรูปร่างเป็นแท่งสี่เหลี่ยมผืนผ้าในซองแปรงมีสปริงกดอยู่ด้านบนเพื่อให้ถ่านนี้สัมผัสกับซี่คอมมิวเตเตอร์ตลอดเวลาเพื่อรับกระแส และส่งกระแสไฟฟ้าระหว่างขดลวดอาร์เมเจอร์กับวงจรไฟฟ้าจากภายนอก คือถ้าเป็นมอเตอร์กระแสตรง จะทำหน้าที่รับกระแสไฟฟ้าจากภายนอกเข้าไปยังคอมมิวเตเตอร์ให้ลวดอาร์เมเจอร์เกิดแรงบิดทำให้มอเตอร์หมุนได้
2.6.2 หลักการของมอเตอร์กระแสไฟฟ้าตรง
หลักการของมอเตอร์ไฟฟ้ากระแสตรง (Motor Action) เมื่อเป็นแรงดนักระแสไฟฟ้าตรงเข้าไปในมอเตอร์ส่วนหนึ่งจะแปรงถ่านผ่านคอมมิวเตเตอร์เข้าไปในขดลวดอาร์มาเจอร์สร้างสนามแม่เหล็กขึ้น และกระแสไฟฟ้าอีกส่วนหนึ่งจะไหลเข้าไปในขดลวดสนามแม่เหล็ก (Field coil)
สร้างขั้วเหนือ-ใต้ขึ้นจะเกิดสนามแม่เหล็ก 2 สนามในขณะเดียวกันตามคุณสมบัติของเส้นแรงแม่เหล็กจะไม่ตัดกันทิศทางตรงข้ามจะหักล้างกัน และทิศทางเดียวจะเสริมแรงกันทาให้เกิดแรงบิดในตัวอาร์มาเจอร์ซึ่งวางแกนเพลา และแกนเพลานี้สวมอยู่กับตลับลุกปืนของมอเตอร์ทาให้อาร์มาเจอร์นี้หมุนได้ขณะที่ตัวอาร์มาเจอร์ทำหน้าที่หมุนได้นี้เรียกว่าโรเตอร์ (Rotor) ซึ่งหมายความว่า ตัวหมุนการที่อำนาจเส้นแรงแม่เหล็กทั้งสองมีปฏิกิริยาต่อกันทำให้ขดลวดอาร์มาเจอร์ หรือโรเตอร์หมุนไปนั้นเป็นไปตามกฎซ้ายของเฟลมมิ่ง (Fleming left hand rule)
2.7 มอเตอร์ไฟฟ้ากระแสสลับ 3 เฟส
2.7.1 ส่วนประกอบของมอเตอร์เหนี่ยวนำ 3 เฟส
มอเตอร์ไฟฟ้ากระแสสลับ 3 เฟส เป็นมอเตอร์ที่นิยมใช้งานกันทั่วไปในโรงงานอุตสาหกรรม โดยเฉพาะมอเตอร์ไฟฟ้ากระแสสลับ 3 เฟส ชนิดที่มีโรเตอร์แบบกรงกระรอกมีข้อดี คือ ไม่มีแปรงถ่านทำให้การสูญเสียเนื่องจากความฝืดมีค่าน้อยมีตัวประกอบกำลังสูงการบำรุงรักษาต่ำ การเริ่มเดินทำได้ไม่ยาก ความเร็วรอบค่อนข้างคงที่สร้างง่ายทนทานราคาถูก และมีประสิทธิภาพสูงแต่มีข้อเสีย ได้แก่ กาเปลี่ยนแปลงความเร็วรอบของมอเตอร์ทำได้ยาก ปัจจุบันได้มีการพัฒนาชุดควบคุมอินเวอเตอร์ใช้สำหรับปรับความเร็วรอบของมอเตอร์ และเป็นที่นิยมใช้กันอย่างแพร่หลาย
มอเตอร์ไฟฟ้ากระแสสลับเป็นเครื่องกลไฟฟ้าที่เปลี่ยนพลังงานไฟฟ้าให้เป็นพลังงานกลในการเปลี่ยนพลังงานไฟฟ้าให้เป็นพลังงานกลนี้พลังงานไฟฟ้าไม่ได้นำเข้าสู่ที่โรเตอร์โดยตรงแต่ได้จากการเหนี่ยวนำ(Induction) จึงนิยมเรียกมอเตอร์ไฟฟ้ากระแสสลับว่า มอเตอร์เหนี่ยวนำ (Induction Motor)
มอเตอร์ไฟฟ้ากระแสสลับ 3 เฟส แบ่งออกได้ 2 แบบ ได้แก่ แบบโรเตอร์กรงกระรอก (Squirrel cage Rotor) และโรเตอร์แบบพันขดลวด (Wound Rotor) มอเตอร์ทั้งสองแบบนี้จะมีส่วนประกอบที่เหมือนๆ กัน คือ ส่วนที่อยู่กับที่แต่จะแตกต่างกันเฉพาะส่วนที่เคลื่อนที่เท่านั้น
2.7.2 ส่วนที่อยู่กับที่ ประกอบด้วยส่วนต่าง ๆ ดังนี้
1. โครงมอเตอร์ (Frame) ทำจากเหล็กหล่อเหนียวหรือเหล็กเหนียวเป็นรูปทรงกระบอกกลวงมีฐานเป็นขาตั้งด้านข้างตัวมอเตอร์จะมีกล่องสำหรับต่อสายไฟ (Terminal Box) โครงทำหน้าที่จับยึดแกนเหล็กที่พันขดลวดให้แน่นอยู่กับที่ และรองรับน้ำหนักทั้งหมดของมอเตอร์ที่ผิวด้านนอกของโครงจะออกแบบให้มีครีบ เพื่อช่วยในการระบายความร้อนของมอเตอร์
2. แกนเหล็กสเตเตอร์ (Stator core) ทำมาจากแผ่นเหล็กบาง ๆ อัดซ้อนกัน และยึดติดเข้ากับโครงของมอเตอร์มีลักษณะเป็นรูปทรงกระบอก และด้านในทำเป็นสลอตไว้สำหรับพันขดลวด นอกจากนี้แกนเหล็กยังทำหน้าที่เป็นทางเดินของวงจรแม่เหล็ก
3. ขดลวดสเตเตอร์ (Stator Winding) ซึ่งเป็นขดลวดทองแดงที่พันอยู่ในสลอตของแกนเหล็กสเตเตอร์ และเป็นลวดทองแดงที่เคลือบด้วยฉนวนไฟฟ้าอย่างดี เมื่อพันเสร็จแล้วจะอาบด้วยน้ำมันวานิช และอบให้แห้งอีกครั้งหนึ่ง
มอเตอร์กระแสสลับ 3 เฟส ที่สเตเตอร์มีขดลวดพันอยู่ 3 ชุด หรือ 3 เฟส ซึ่งแต่ละเฟสจะทำมุมห่างกัน 120 องศาไฟฟ้า และขดลวดแต่ละเฟสจะต่ออนุกรมกันเหมือนกับขดลวดอาร์เมเจอร์ของเครื่องกำเนิดไฟฟ้ากระแสสลับแต่ละเฟสมีกลุ่มของขดลวดอีก เช่น มอเตอร์ที่มี 36 สลอต (Slot) 4 ขั้วแม่เหล็ก (Pole) 3 เฟส (Phase)
จำนวนสลอตต่อขั้ว (Slot/Pole) จะมีค่าเท่ากับ 9 สลอต ดังนั้นจำนวนกลุ่มของขดลวดในหนึ่งขั้วแม่เหล็กต้องเท่ากับ 9 ขด และแบ่งจำนวนกลุ่มของขดลวดต่อหนึ่งเฟสจะมีค่าเป็น 3 ขด ในการพันขดลวดทั้งสามขดของแต่ละเฟสนี้จะพันลงสลอตเรียงกันไป 3 สลอต และการพันขดลวดทั้ง 9 ขดในหนึ่งขั้วจะพันเรียงกันไป 9 สลอต
เมื่อพันขดลวดจนครบทั้ง 36 ขดแล้วจะสังเกตเห็นว่าในหนึ่งสลอตจะมีขดลวด 2 ขด ซึ่งเป็นด้านของขดลวดที่ต่างกันเรียกว่า การพันขดลวดแบบสองชั้น (Two Layer) เป็นที่นิยมพันกัน โดยทั่วไป
เนื่องจากลักษณะการพันขดลวดสเตเตอร์ของมอเตอร์จะเหมือนกับขดลวดอาร์เมเจอร์ในเครื่องกำ เนิดไฟฟ้ากระแสสลับ ซึ่งระยะพิตช์ (Pitch) ของขดลวดสามารถแบ่งออกได้เป็น 2 แบบ ได้แก่ ขดลวดที่มีระยะพิตช์เต็ม (Full Pitch) และระยะพิตช์เศษส่วน (Fractional Pitch or Short Pitch)
4. ฝาปิดหัวท้าย (End Plate) ทำจากเหล็กหล่อเหนียว หรือเหล็กเหนียวฝาปิดนี้จะถูกยึดติดอยู่กับโครงมอเตอร์ด้วยสลักเกลียวมีแบริ่งอยู่ตรงกลางสำหรับรองรับเพลาเพื่อให้โรเตอร์หมุนอยู่ในแนวศูนย์กลางพอดี
2.8 แรงเสียดทาน (Frictional force)
ความหมายของแรงเสียดทาน
แรงเสียดทานเป็นแรงที่เกิดขึ้นตามแนวสัมผัสระหว่างผิวที่สัมผัสกัน แรงเสียดทานจะเกิดขึ้นต่อเมื่อ ผิวสัมผัสหนึ่งพยายามเคลื่อนที่ หรือเคลื่อนที่ไถลต่ออีกผิวสัมผัสหนึ่ง และทิศทางของแรงเสียดทานจะตรงข้ามกับทิศทางของแนวโน้มของการเคลื่อนที่นั้นในเครื่องกล และกระบวนการปฏิบัติงานส่วนใหญ่มักต้องการลดผลการหน่วงเหนี่ยวของแรงเสียดทาน เช่น ระบบตลับลูกปืน ระบบเกียร์ ระบบการไหลของของไหลในท่อ ระบบขับดันของเครื่องบิน และขีปนาวุธผ่าน บรรยากาศ ในบางสถานการณ์ต้องการเพิ่มแรงเสียดทาน เช่น ระบบห้ามล้อรถยนต์ ระบบคลัทซ์ ระบบสายพานขับเคลื่อน และระบบลิ่ม สำหรับการเคลื่อนที่ของล้อยานพาหนะจะขึ้นอยู่กับแรงเสียดทานทั้งการออกตัววิ่ง และการหยุดวิ่งการเดินตามปกติก็ขึ้นอยู่กับความเสียดทานระหว่าง รองเท้ากับพื้น (ครรชิต, วิรัตน์ และถิรวุฒิ, 2557)
ในปี ค.ศ.1781 ซี.เอ.คูลอมบ์ (C.A. Coulomb) ได้ทดลองเกี่ยวกับความเสียดทานกับ วัตถุแข็งที่ไม่มีสารหล่อลื่น โดยพิจารณาวัตถุหนัก W วางอยู่บนพื้น จะมีแรง ปฏิกิริยาของพื้น N=W กระทำต่อวัตถุ วัตถุที่ไม่เคลื่อนที่ และไม่มีแรงเสียดทานเกิดขึ้น แต่ถ้าใส่แรง P ในแนวราบบนวัตถุ แรง P จะพยายามทา ให้วัตถุเคลื่อนที่ไปในแนวราบ ขณะที่ แรง P มีขนาดเล็กวัตถุยังไม่เคลื่อนที่จะมีแรงต้านการเคลื่อนที่ในแนวราบ F เรียกว่า แรงเสียดทาน สถิต (Static friction force) แรงเสียดทานนี้จะขึ้นอยู่กับลักษณะ หรือสภาพของผิวสัมผัส (Nature of contacting surfaces) ว่าขรุขระมากน้อยเพียงใด ขณะที่วัตถุไม่เคลื่อนที่ ซึ่งหมายความ ว่าระบบแรงอยู่ในสภาวะสมดุล ดังนั้นแรง F=P เมื่อเพิ่มแรง P มากขึ้นแรงเสียดทานจะเพิ่มตาม เมื่อแรง P เพิ่มจนถึงค่า ๆ หนึ่งซึ่งเป็นค่าสูงสุด แรงเสียดทานจะมีค่าสูงสุด F= ถ้าแรง P (หรือลื่นไถล) เรียก สภาวะที่ค่าแรงเสียดทานสูงสุดนี้ว่า วัตถุกำลังจะเคลื่อนที่ (Impending motion) หรือเริ่มเคลื่อนที่ พอดี
ถ้าแรง เพิ่มมากขึ้น แรงเสียดทานจะไม่สามารถต้านการเคลื่อนที่วัตถุจะเคลื่อนที่ หรือลื่นไถลไปแรงเสียดทานที่พื้นมีต่อวัตถุจะยังมีอยู่ และมีขนาดลดลงเป็นค่า ซึ่งเรียกว่า แรงเสียดทานจลน์
แรงเสียดทานนี้จะมีขนาดคงที่เมื่อวัตถุเคลื่อนที่เร็วขึ้น แสดงความสัมพันธ์ระหว่างแรงเสียดทานกับแรง ซึ่งพบว่าความเสียดทานสูงสุดสถิต แปร ผันตามขนาดของแรงปฏิกิริยาตั้งฉาก N
(2.17)
เมื่อ คือ ความเสียดทานสถิตสูงสุด (นิวตัน)
คือ สัมประสิทธิ์แรงเสียดทานสถิต
N คือ ขนาดของแรงปฏิกิริยา (นิวตัน)
ในทำนองเดียวกันแรงเสียดทานจลน์จะแปรผันตามขนาดของแรงปฏิกิริยา N ด้วย
(2.18)
เมื่อ คือ ความเสียดทานจลน์สูงสุด (นิวตัน)
คือ สัมประสิทธิ์แรงเสียดทานสถิต
คือ ขนาดของแรงปฏิกิริยา (นิวตัน)
ค่า และ ไม่ขึ้นกับขนาดของพื้นที่ของผิวสัมผัส แต่จะขึ้นอยู่กับลักษณะ หรือสภาพ (Nature) ของผิวสัมผัสซึ่งแตกต่างกันตามวัสดุ (โดยทั่วไปค่า จะน้อยกว่าค่า ประมาณ 25%)
สรุปพฤติกรรมของวัตถุแข็งที่สัมผัสกับพื้นราบ
- No friction) เนื่องจากแรงเสียดทานภายนอก P และ น้ำหนัก W เป็นแรงในแนวดิ่งไม่มีแรงที่พยายามทำให้เกิดการเคลื่อนที่ในแนวราบ (=0) ดังนั้นจึงไม่มีแรงเสียดทานเกิดขึ้น
- <) แต่แรงเสียดทานที่เกิดขึ้นจะต้านการเคลื่อนที่วัตถุอยู่ในสภาวะสมดุลแรงปฏิกิริยาในแนวตั้งฉาก N= +W
- เมื่อแรงภายนอก มีขนาดเพิ่มขึ้น จนค่าแรงย่อย ใน แนวราบ มีขนาดเท่ากับแรงเสียดทานสูงสุด f ระหว่างวัตถุกับพื้นพอดี คือ == N วัตถุจะเริ่มเคลื่อนที่พอดี และถือว่าวัตถุยังอยู่ในสภาวะสมดุล แรง N= +W
- เมื่อวัตถุเคลื่อนที่แล้ว เนื่องจากแรง เอาชนะแรงเสียดทานสูงสุด
(>) ดังนั้น วัตถุไม่อยู่ในสภาวะสมดุล แต่แรงเสียดทานจะเป็นแรงเสียดทานจลน์ = N
2.9 มอเตอร์สเต็ปเปอร์
2.9.1 คุณสมบัติเด่นของสเต็ปเปอร์มอเตอร์
1.
มุมในการหมุน (rotation angle) มีค่าตามสัดส่วนของจำนวนของพัลส์อินพุตที่ใช้ขับมอเตอร์
2. ความเร็วในการหมุน (rotation speed) มีค่าตามสัดส่วน
และสัมพันธ์กับความถี่ของสัญญาณพัลส์อินพุตที่ใช้ขับมอเตอร์
3.
ใช้ในการควบคุมตำแหน่งแบบระบบเปิดที่มีความแม่นยำสูง โดยไม่มีต้องใช้สัญญาณป้อนกลับของการกำหนดตำแหน่ง
4. ไม่มีความผิดพลาดสะสมของการกำหนดตำแหน่ง
5.
เหมาะกับงานที่ต้องการกลไกเคลื่อนที่ความเร็วต่ำ แรงบิดสูง โดยไม่ต้องใช้ระบบเฟืองทดรอบเพิ่มเติม
6.
สามารถกำเนิด และรักษาแรงบิดได้ในทันทีที่มอเตอร์ถูกกระตุ้นให้ทำงาน
7.
สามารถรักษาสภาวะการหมุนของแกนได้โดยไม่ทำให้มอเตอร์เสียหาย
8.ไม่มีแปรงถ่าน ทำให้มีอายุการใช้งานที่ยาวนาน
9.
มีลูกปืนความเที่ยงตรงสูง เพื่อช่วยการหมุนของแกนมีความแม่นยำ
2.9.2 ข้อด้อยของสเต็ปเปอร์มอเตอร์
1.
การกำทอนหรือการเกิดเรโซแนนซ์ทำให้ไม่สามารถควบคุมการทำงานของสเต็ปเปอร์มอเตอร์ได้
2. การทำให้มอเตอร์สามารถหมุนแกนด้วยความเร็วสูงทำได้ยาก
3. หากเกิดแรงบิดสูงสูงเกินกว่าที่รับได้หรือเกิดโอเวอร์ทอร์กมอเตอร์จะสูญเสียการรับรู้ตำแหน่งของแกนหมุน
จะต้องกลับไปเริ่มต้นการอินิเชียลใหม่
4. ให้แรงบิดที่น้อยกว่ามอเตอร์ไฟตรง และมอเตอร์ไฟสลับที่ขนาดของตัวมอเตอร์เท่ากัน
สเต็ปเปอร์มอเตอร์เป็นมอเตอร์ที่มีลักษณะการทำงานแตกต่างจากมอเตอร์ทั่วไป เพราะจะต้องป้อนสัญญาณเป็นพัลส์ให้แก่ขดลวดของมอเตอร์เป็นจังหวะอย่างเหมาะสม และการหมุนของมอเตอร์ชนิดนี้จะหมุนเป็นจังหวะตามพัลส์ที่ป้อนเข้ามา หากมีการป้อนสัญญาณพัลส์ต่อเนื่อง มอเตอร์ก็จะสามารถหมุนได้อย่างต่อเนื่องเหมือนกับมอเตอร์ไฟตรงปกติ ดังนั้นด้วยจังหวะในการป้อนสัญญาณพัลส์จึงทำให้ผู้ควบคุมสามารถเลือกตำแหน่งที่ต้องการให้มอเตอร์หยุดหมุนได้
จังหวะการหมุนของสเต็ปเปอร์มอเตอร์เรียกว่า สเต็ป (step) นั่นจึงเป็นที่มาของชื่อของมอเตอร์ชนิดนี้ความละเอียดของมอเตอร์กำหนดเป็นองศาที่หมุนไปในหนึ่งสเต็ป หากมอเตอร์มีจำนวนองศาต่อสเต็ปมาก หมายความว่า มอเตอร์ตัวนี้มีความละเอียดของการหมุนต่ำ ยกตัวอย่าง การหมุนครบ 1 รอบเท่ากับ 360 องศา หากมอเตอร์มีสเต็ปการหมุนเท่ากับ 7.5 องศาต่อสเต็ป มอเตอร์ตัวนี้มีความละเอียดของการหมุนเท่ากับ 48 ตำแหน่ง แต่ถ้าหากมีสเต็ปการหมุนกับ 1.8 องศาต่อสเต็ป ความละเอียดของการหมุนเท่ากับ 200 จะเห็นได้ว่ามอเตอร์ตัวหลังมีความละเอียดสูงกว่าตัวแรกมาก ทำให้นำมาใช้ในงานที่ต้องการกำหนดตำแหน่งได้ดีกว่า แม่นยำกว่า ผนวกเข้ากับวงจรขับแบบครึ่งสเต็ป ความละเอียดของการหมุนจะเพิ่มขึ้นอีก 2 เท่า ทำให้มีความละเอียดของการหมุนกลายเป็น 400 ตำแหน่ง
ขนาดของสเต็ปเปอร์มอเตอร์ที่มีการผลิต และจำหน่ายในท้องตลาด มีตั้งแต่ขนาดแรงดันต่ำ 3V ไปจนถึง 24V และ 48V ส่วนขนาดของกระแสมีตั้งแต่ไม่กี่สิบมิลลิแอมป์อันเป็นสเต็ปเปอร์มอเตอร์ตัวเล็กไปจนถึงเป็นสิบแอมป์ ซึ่งมีขนาดของมอเตอร์ใหญ่โตขึ้นตามลำดับราคาอยู่ในหลักเป็นร้อยบาทขึ้นไปสำหรับของใหม่
2.9.3 ชนิดของสเต็ปเปอร์มอเตอร์
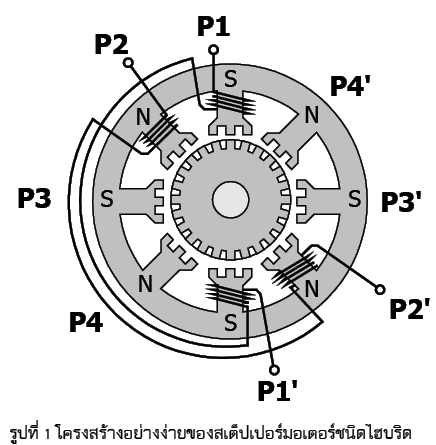
ในอดีตมีการแบ่งชนิดของสเต็ปเปอร์มอเตอร์ตามลักษณะโครงสร้างซึ่งแบ่งได้เป็น 3 ชนิดคือ แบบแม่เหล็กถาวรหรือ PM (Permanent Magnet) แบบปรับค่าความต้านทานแม่เหล็กได้หรือ VR (Variable Reluctance) และแบบผสมหรือไฮบริด (Hybrid) ซึ่งเป็นการผสมกันระหว่างแบบ PM และ VR ในปัจจุบันนี้สเต็ปเปอร์มอเตอร์ส่วนใหญ่เป็นแบบไฮบริด เนื่องจากสามารถทำให้มีความละเอียดในการเคลื่อนที่ของแกนได้สูงถึง 0.9 องศาต่อสเต็ป (ซึ่งเป็นข้อดีของแบบ VR) และให้แรงบิดหรือทอร์กที่สูง โดยใช้พลังงานต่ำ (เป็นข้อดีของแบบ PM) ในรูปที่ 2.5 แสดงโครงสร้างอย่างง่ายของสเต็ปเปอร์มอเตอร์แบบไฮบริด
รูปที่ 2-4 โครงสร้าอย่างง่ายของสเต็ปเปอร์มอเตอร์ชนิดไฮบริด
(ที่มา: http://www.inventor.in.th/home/wp-content/uploads/2013/11/stepper001.jpg )
ดังนั้นการกำหนดชนิดของสเต็ปเปอร์มอเตอร์ในยุคต่อมาจนถึงปัจจุบันจึงพิจารณาที่ลักษณะของการพันขดลวด, การต่อสายออกมาใช้งาน และวงจรขับ ซึ่งแบ่งเป็น 2 ชนิดหลักๆ คือ ชนิดไบโพลาร์ (bipolar) และชนิดยูนิโพลาร์ (unit-polar)
2.9.3.1 สเต็ปเปอร์มอเตอร์แบบไบโพล่าร์
มีลักษณะการพันขดลวดของมอเตอร์แสดงในรูปที่ 2 แบ่งออกเป็น 2 ขดที่ไม่มีแท็ปกลาง ทำให้บางครั้งจึงเรียกสเต็ปเปอร์มอเตอร์แบบนี้ว่า เป็นสเต็ปเปอร์มอเตอร์แบบ 2 เฟส การขับให้มอเตอร์แบบนี้หมุนจะต้องป้อนแรงดันต่างขั้วกันให้แก่ขดลวดแต่ละขด ทำให้วงจรขับสเต็ปเปอร์มอเตอร์แบบนี้ค่อนข้างซับซ้อน
รูปที่ 2-5 ลักษณะการพันขดลวดสเต็ปเปอร์มอเตอร์ยูนิโพล่าร์
(ที่มา :http://www.inventor.in.th/home/wp-content/uploads/2013/11/stepper002.jpg )
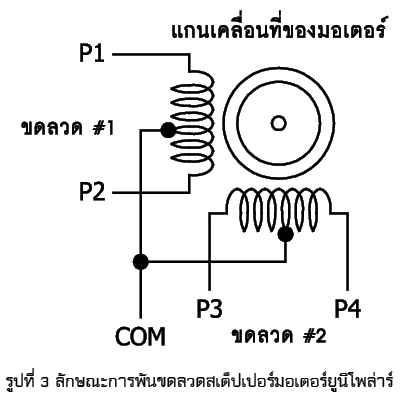
2.9.3.2 สเต็ปเปอร์มอเตอร์แบบยูนิโพล่าร์
มีลักษณะการพันขดลวดของมอเตอร์แสดงในรูปที่ 3 มีด้วยกัน 2 แบบคือ แบบ 5 และ 6 สาย บางครั้งเรียกสเต็ปเปอร์มอเตอร์แบบนี้ว่า เป็น
สเต็ปเปอร์มอเตอร์แบบ 4 เฟส การขับจะต้องป้อนสัญญาณเข้าที่ขั้วหรือเฟสของมอเตอร์ให้เรียงลำดับอย่างถูกต้อง มอเตอร์จึงจะสามารถหมุนได้อย่างราบรื่น
สเต็ปเปอร์มอเตอร์แบบนี้มีการพันขดลวด 2 ขดบนแต่ละขั้วแม่เหล็กของสเตเตอร์ แต่ละขดแบ่งเป็น 2 เฟส รวมมอเตอร์ทั้งตัวจะมี 4 เฟสคือ เฟส 1, 2, 3 และ 4 มีการต่อสายออกมาจากขดลวดแต่ละขดเพื่อจ่ายไฟเลี้ยง ทำให้สเต็ปเปอร์มอเตอร์แบบนี้มีทั้งแบบ 5 สายและ 6 สาย ถ้าเป็นแบบ 5 สาย จะเป็นการนำสายไฟเลี้ยงของขดลวดทั้งสองมาต่อรวมกันเป็นสายเดียว สำหรับในบทความนี้จะเน้นหนักไปที่สเต็ปเปอร์แบบยูนิโพล่าร์นี้ เนื่องจากสามารถหาได้ง่ายกว่า และใช้วงจรขับที่มีความซับซ้อนน้อยกว่ามาก
รูปที่ 2-6 ลักษณะการพันขดลวดสเต็ปเปอร์มอเตอร์ยูนิโพล่าร์
(ที่มา: http://www.inventor.in.th/home/wp-content/uploads/2013/11/stepper003.jpg )
2.9.4 ขนาดของสเต็ปเปอร์มอเตอร์มาตรฐาน
เพื่อให้การเลือกใช้งานสเต็ปเปอร์มอเตอร์เป็นสากลจึงได้มีการกำหนดมาตรฐานขนาดของสเต็ปเปอร์มอเตอร์ขึ้นภายใต้ข้อตกลงร่วมกันของสมาคมผู้ผลิตชิ้นส่วนทางไฟฟ้าแห่งชาติหรือ NEMA (National Electrical Manufacturer’s Association) ได้ทำการกำหนดขนาดมาตรฐานของสเต็ปเปอร์มอเตอร์ออกมา โดยแบ่งตามลักษณะรูปร่างของสเต็ปเปอร์มอเตอร์ดังนี้
- รูปลูกบาศก์ (Cube) มีด้วยกัน 4 ขนาดคือ NEMA 14, 15, 16 และ 17
(ที่มา : http://www.inventor.in.th/home/wp-content/uploads/2013/11/stepper004.jpg)
ข้อมูลทางเทคนิคที่สำคัญ
- (1.8 องศา/สเต็ป หรือ 0.9 องศา/สเต็ป)
- (Cylinder) มีขนาดเดียวคือ NEMA 23
รูปที่ 2-7 ข้อมูลเบื้องต้นที่ควรทราบของสเต็ปเปอร์มอเตอร์มาตรฐาน NEMA23
(ที่มา : http://www.inventor.in.th/home/wp-content/uploads/2013/11/stepper005.jpg)
ข้อมูลทางเทคนิคที่สำคัญ
- (1.8 องศา/สเต็ป)
- 2.2 นิ้ว
- Stack can) สเต็ปเปอร์มอเตอร์ที่มีรูปร่างแบบนี้จะมีขนาดที่ไม่แน่นอน แต่ส่วนใหญ่จะมีขนาดเล็กคือ มีขนาดเส้นผ่านศูนย์กลางประมาณ 2 นิ้ว รายละเอียดทางเทคนิคอื่น ๆ
รูปที่ 2-8 ข้อมูลเบื้องต้นที่ควรทราบของสเต็ปเปอร์มอเตอร์มาตรฐานทรงกระป๋องซ้อน
(ที่มา: http://www.inventor.in.th/home/wp-content/uploads/2013/11/stepper006.jpg)
ข้อมูลทางเทคนิคที่สำคัญ
- (15 องศา/สเต็ป หรือ 7.5 องศา/สเต็ป)
- 2.2 นิ้ว
2.9.5 การกระตุ้น และควบคุมการหมุนของสเต็ปเปอร์มอเตอร์แบบยูนิโพล่าร์
การกระตุ้น และควบคุมการหมุนของมอเตอร์ให้เคลื่อนที่ไปแต่ละสเต็ปทำได้โดยจ่ายกำลังไฟฟ้าไปยังขดลวดแต่ละขดบนสเตเตอร์ ซึ่งต้องป้อนเป็นแบบซีเควนเชียลในรูปแบบที่ถูกต้องด้วย สามารถแบ่งได้เป็น 3 รูปแบบคือ แบบเวฟ (wave) หรือแบบฟูลเต็ป 1 เฟส (full step 1-phase), แบบฟูลสเต็ป 2 เฟส และแบบครึ่งสเต็ป (half step)
2.9.6 การกระตุ้นสเต็ปเปอร์มอเตอร์แบบเวฟหรือฟูลสเต็ป 1 เฟส
เป็นการกระตุ้นที่มีรูปแบบง่ายที่สุด โดยทำการกระตุ้นขดลวดทีละขดในเวลาหนึ่งไล่เรียงถัดกันไป เช่น เริ่มต้นที่ขดที่ 1, 2, 3, 4 แล้ววนกลับมาขดที่ 1 วนไปเรื่อยๆ หรือเริ่มที่ขดที่ 1 แล้วย้อนไปยังขดที่ 4, 3, 2 แล้วกลับมายังขดที่ 1 อีกครั้ง ซึ่งทำให้ทิศทางของการหมุนสวนกัน ในการกระตุ้นรูปแบบนี้จึงมีขดลวดเพียงขดเดียวในเวลาหนึ่งที่ถูกกระตุ้นเท่านั้น วงจรกระตุ้นแบบนี้มีราคาถูกและง่าย
(ที่มา: http://www.inventor.in.th/home/wp-content/uploads/2013/11/stepper-table01.jpg)
2.9.7 การกระตุ้นแบบฟูลสเต็ป 2 เฟส
เป็นการกระตุ้นซึ่งคล้ายกับแบบฟูลสเต็ปหนึ่งเฟส แต่การกระตุ้นแบบนี้จ่ายกำลังไฟฟ้าไปที่ขดลวด 2 ขดที่อยู่ใกล้กันในเวลาเดียวกัน และเรียงถัดกันไปเช่นเดียวกับแบบฟูลสเต็ป 1 เฟส ดังตัวอย่าง ขดลวดชุดแรกที่ถูกกระตุ้นจะเป็นขดที่ 1 และ 2 ตามด้วยการกระตุ้นขดที่ 2 และ 3 ต่อไปเป็นขดที่ 3 และ 4 ถัดไปเป็นขดที่ 4 และ 1 แล้วกลับมาที่ขดที่ 1 และ 2 วนไปตามลำดับเช่นนี้ หรือเริ่มที่ขด 1 และ 4 ตามด้วยขดที่ 4 และ 3 ถัดไปเป็นขดที่ 3 และ 2 ต่อไปเป็นขดที่ 2 และ 1 แล้ววนกลับมาที่ขดที่ 1 และ 4 ทิศทางการหมุนจะสวนทางกัน การกระตุ้นสเต็ปเปอร์มอเตอร์แบบนี้สามารถเพิ่มแรงบิดได้มากกว่าแบบฟูลสเต็ป 1 เฟส โรเตอร์จะเคลื่อนที่ด้วยแรงดึงอย่างเต็มแรงจาก 2 ขดลวดที่ถูกกระตุ้นพร้อมกัน และเคลื่อนที่ต่อไปด้วยแรงดึงจากอีก 2 ขดลวดถัดไป สำหรับข้อเสียคือการกระตุ้นแบบนี้ต้องใช้กำลังไฟฟ้ามากขึ้น
(ที่มา: http://www.inventor.in.th/home/wp-content/uploads/2013/11/stepper-table02.jpg)
2.9.8 การกระตุ้นแบบครึ่งสเต็ปหรือฮาล์ฟสเต็ป
เป็นรูปแบบที่ผสมผสานระหว่างการกระตุ้นแบบฟูลสเต็ป 1 และ 2 เฟส เพื่อเพิ่มจำนวน ของสเต็ปต่อรอบอีกเท่าตัวหนึ่ง ในระบบนี้จะกระตุ้นขดลวดเรียงกันไปเป็นลำดับดังนี้ เริ่มจากขดลวดที่ 1, 1 และ 2, 2, 2 และ 3, 3, 3 และ 4, 4, 4 และ 1 แล้ววนกลับมายังขดลวดที่ 1
แรงบิดที่ได้จากการกระตุ้นแบบนี้จะเพิ่มมากขึ้นอีก เพราะช่วงสเต็ปมีระยะสั้นลง แต่ละสเต็ปเกิดแรงดึงจากขดลวด 2 ขดที่ถูกกระตุ้นพร้อมกัน ความถูกต้องของตำแหน่งมีเพิ่มมากขึ้น แต่ต้องพึงระวังไว้อีกประการหนึ่งว่าเมื่อกระตุ้นให้ทำงานในรูปแบบนี้จะต้องทำการหมุนถึง 2 สเต็ป จึงจะได้เท่ากับระยะเท่ากับ 1 สเต็ปเต็มของการควบคุมใน 2 แบบแรก สำหรับแหล่งจ่ายกำลังไฟฟ้าต้องใช้ขนาดเท่ากับแบบ 2 เฟสเป็นอย่างน้อยจึงจะเพียงพอ
(ที่มา: http://www.inventor.in.th/home/wp-content/uploads/2013/11/stepper-table03.jpg)
การทำงานของสเต็ปเปอร์มอเตอร์แบบไฮบริด
สเต็ปเปอร์มอเตอร์แบบไฮบริดมีแม่เหล็กถาวรที่มีลักษณะเป็นทรงกระบอกที่มีขั้วเหนือ และใต้สลับกันตามแนวของทรงกระบอกทำหน้าที่เป็นส่วนของโรเตอร์ ขดลวดทั้ง 4 เฟสที่พันรอบแกนเหล็กทำหน้าที่เป็นสเตเตอร์ที่มีขั้วแม่เหล็กเปลี่ยนแปลงตามสัญญาณกระตุ้นที่ส่งเข้าไปในตัวมอเตอร์ ทำให้เกิดแรงดูด และแรงผลักกับโรเตอร์ทำให้แกนของมอเตอร์เกิดการหมุน และล็อกตำแหน่งได้ตามที่ผู้ใช้งานต้องการ
รูปที่ 2-9 ภาพจำลองการหมุนของสเต็ปเปอร์มอเตอร์แบบยูนิโพล่าร์
(ที่มา: http://www.inventor.in.th/home/wp-content/uploads/2013/11/stepper007.jpg)
ในรูปที่ 2.11 แสดงภาพจำลองของการหมุนของสเต็ปเปอร์มอเตอร์ที่มีความละเอียด 15 องศาต่อสเต็ป นั่นคือ มีจำนวนสเต็ปของการหมุนครบรอบเท่ากับ 24 สเต็ปได้ โดยใช้การขับแบบฟูลสเต็ป 1 เฟส เมื่อป้อนสัญญาณพัลส์กระตุ้นเข้าที่เฟส P1 ทำให้เกิดขั้วแม่เหล็กใต้ขึ้น จึงเกิดแรงผลักขั้วแม่เหล็กใต้ของเพื่อให้พบกับขั้วแม่เหล็กเหนือของโรเตอร์ ในจังหวะนั้นเองแกนหมุนของมอเตอร์จะเกิดการเคลื่อนที่เปลี่ยนตำแหน่งไป 1 สเต็ป เมื่อขั้วแม่เหล็กใต้ของสเตเตอร์พบกับขั้วแม่เหล็กเหนือของโรเตอร์จะเกิดแรงแม่เหล็กดูดกัน ทำให้แกนหมุนหยุดนิ่ง ถ้าสังเกตต่อไปที่ขั้วของสเตอร์ของขดลวดในเฟสที่เหลือจะพบว่ามันเหลื่อมกัน ทำให้แรงแม่เหล็กเกิดการหักล้างกัน
จากนั้นป้อนสัญญาณเข้าที่เฟส P2 ทำให้เกิดขั้วแม่เหล็กเหนือขึ้นที่สเตเตอร์นั้น ทำให้เกิดแรงผลักอีก 1 จังหวะ ส่งผลให้แกนหมุนของมอเตอร์เคลื่อนที่ต่อเนื่องไปอีก 1 สเต็ป เมื่อขั้วแม่เหล็กเหนือของสเตเตอร์พบกับขั้วแม่เหล็กใต้ของโรเตอร์จะเกิดแรงแม่เหล็กดูดกัน ทำให้แกนหมุนหยุดนิ่ง และจะเป็นเช่นนี้ไปตลอดหากมีการป้อนสัญญาณกระตุ้นไล่ตามลำดับมายัง P3 และ P4 แล้ววนกลับไปที่ P1 อีก แกนหมุนของมอเตอร์ก็จะเกิดการเคลื่อนที่เปลี่ยนมุมไปอย่างต่อเนื่องจนครบ 1 เมื่อเคลื่อนที่ครบ 24 สเต็ปหากสเต็ปเปอร์มอเตอร์มีความละเอียดของการหมุนมากขึ้น เช่น 7.5 องศาต่อสเต็ป จำนวนสเต็ปที่ต้องการใน 1 รอบจะเพิ่มเป็น 48 สเต็ป และสูงถึง 200 สเต็ปหากมอเตอร์มีความละเอียด 1.8 องศาต่อสเต็ป
2.9.9 วงจรขับสเต็ปเปอร์มอเตอร์อย่างง่าย
จากการทำงานที่อธิบายมา เราสามารถใช้วงจรขับสเต็ปเปอปร์มอเตอร์ได้หลายแบบ โดยมหลักการที่ตรงกันคือ ป้อนสัญญาณกระตุ้นอย่างเป็นลำดับที่ถูกต้องแก่ขั้วหรือเฟสของสเต็ปเปอร์มอเตอร์ และถ้าหากต้องการให้มอเตอร์หมุนเร็วหรือช้าให้ทำการกำหนดหรือปรับแต่งที่ความถี่ของสัญญาณกระตุ้นที่ใช้ขับมอเตอร์ในรูปที่ 8 แสดงวงจรขับสเต็ปเปอร์มอเตอร์แบบยูนิโพล่าร์อย่างง่ายแบบฟูลสเต็ป 1 เฟสที่ไม่ต้องใช้ไมโครคอนโทรลเลอร์ เพียงมีวงจรกำเนิดสัญญาณพัลส์ซึ่งในวงจรใช้ไอซีเบอร์ 4093 (อาจใช้เบอร์ 4011 แทนได้) ส่งสัญญาณไปยังวงจรจัดการลำดับของสัญญาณกระตุ้น ซึ่งในวงจรใช้ไอซีเบอร์ 4017 เข้ามาจัดการเพื่อให้มีการส่งสัญญาณกระตุ้นไปยังมอเตอร์ทีละเฟส ส่วนวงจรขับจริงๆ ใช้ไอซีขับโหลดกระแสสูงเบอร์ ULN2003
รูปที่ 2-10 วงจรขับสเต็ปเปอร์มอเตอร์แบบฟูลสเต็ป 1 เฟส
(ที่มา : http://www.inventor.in.th/home/wp-content/uploads/2013/11/stepper008.jpg)
2.10 โซ่ส่งกำลัง (Chain Drives)
โซ่สามารถส่งกำลังให้ได้โมเมนต์บิด (หมุน) สูงมากโดยที่ให้เป็นชุดส่งกำลังมีขนาดเล็กได้ เป็น ลักษณะการส่งกำลังด้วยรูปร่าง และที่รองเพลาจะรับภาระน้อยมาก ไม่มีการให้ลื่นไถลในขณะส่งกำ ลังในขณะส่งกำลังข้อต่อโซ่จะรับภาระความเสียดทานลื่น (Sliding Friction) จึงต้องมีการหล่อลื่นที่ เพียงพอ โซ่ส่งกำลังจะมีใช้งานในที่รับภาระดึงมาก ๆ ในที่รับอุณหภูมิสูง, โรงงานเคมี, ไอน้ำมัน, ความชื้น เป็นที่ซึ่งสายพานไม่สามารถนำไปใช้งานได้
2.10.1 ชนิดของโซ่
ตามประเภทการใช้งานของโซ่จะนำโซ่มาใช้ส่งกำลัง, ลำเลียง, ใช้ขับ, ใช้ยก และส่งน้ำหนักลง ข้างล่างส่งถ่ายแรง และโมเมนต์บิดโซ่จึงแบ่งตามลักษณะรูปร่างได้ดังนี้ โซ่ลูกกลิ้ง และโซ่บูชโซ่ ลูกกลิ้ง และโซ่บูชจะประกอบด้วยแผ่นปิดข้าง โซด้านนอก และด้านในที่ยึดด้วยบูช และโบลต์เข้า ด้วยกัน โซ่ลูกกลิ้งที่มีใช้งานส่วนใหญ่จะมีลูกกลิ้งที่ชุบแข็งร้อย (หมุนได้) อยู่ในบูชลูกกลิ้งนี้จะช่วยลด ความเสียดทาน และการสึกหรอของด้านข้างของเฟืองโซ่ในขณะที่ล้อเฟืองขับโซ่ และมีเสียงดังน้อยเมื่อความเร็วโซ่สูงในการใช้งานให้รับโมเมนต์หมุนมาก ๆ จะใช้โซ่ลูกกลิ้ง และโซ่บูชแบบชุดหลายเส้น โซ่ ลูกกลิ้งตามมาตรฐานจะนามาใช้งานได้ถึงความเร็ว 30 m/s ในการส่งกำลังในรถยนต์ในเครื่องมือกล และโซ่ลำเลียง โดยปกติโซ่บูชจะทนการสึกหรอมากกว่าโซ่โบลต์บูชจะหมุนได้ส่วนโบลต์จะยึดแน่น กับแผ่นปิดนอกแผ่นปิดส่วนใหญ่จะทาจาก St60 ส่วนโบลต์จะทำจากเหล็กกล้าอาบคาร์บอน C15
2.10.2 โซ่โลเล่อร์ (roller Chain)
โซ่โรลเล่อร์มีลักษณะการจัดเรียงตัวเป็น 2 แบบคือแบบโซ่เส้นเดียว (single strand) และแบบโซ่หลายเส้น (multiple strand)โซ่โรลเล่อร์แบบมาตรฐาน(standard roller chain) ถูกำหนดให้ และ กำหนดลักษณะเฉพาะโดยใช้ code ตัวเลข 2 (two digit designation code) เลขตัวแรกแสดงจำนวน 1/8 ของนิ้วหรือ 3.175 mm ซึ่งเป็นขนาดระยะพิตซ์ของข้อโซ่ (ChaIn pitch) ทั้งนี้คือ ระยะห่างระหว่างจุดศูนย์กลางของข้อโซ่ที่อยู่ติดตัวเลขตัวที่สอง หมายถึงชนิดของการสร้างเพื่อใช้งานเลข “0”หมายถึงโซ่โรลเล่อร์ที่สร้างขึ้นมาเพื่อใช้งานธรรมดาเลข “1” หมายถึงโซ่ที่มีน้ำหนักเบา (light weight chain) และเลข “5” หมายถึงโซ่ชนิด rollerless bushing chain สำหรับเครื่องหมายขีด (hyphenated) และตัวเลขที่อยู่ตามมาจะแสดงจำนวนเส้นของโซ่ที่ใช้งาน (Strands) ตัวอักษร H หมายถึงโซ่ที่ออกแบบขึ้นมาเพื่อใช้ในงานก่อสร้างขนาดหนัก ตัวอย่าง 60-2H หมายถึงโซ่โรลเล่อร์ชนิด 2 เส้นเพื่อใช้กับงานก่อสร้างมีขนาดระยะพิตซ์เท่ากับ 6/8 นิ้ว
ส่วนประกอบของโซ่โรลเล่อร์มีดังนี้คือ roller , links , pin links ขนาดของโซ่โรลเล่อร์ และฟันเฟืองถูกกำหนดให้ตามมาตรฐานโดย American National Standard lhstitute (ANS) โซ่โรลเล่อร์ถูกกำหนดขนาดที่ใช้ 3 ค่าหลักคือ ระยะพิตซ์ ความกว้างของโซ่ และขนาดเส้นผ่านศูนย์กลางของตัวโรลเล่อร์ ข้อมูลทางเทคนิคที่ใช้ในการออกแบบโซ่โรลเล่อร์ และฟันเฟืองโซ่หาดูได้จากหนังสือคู่มือการ ออกแบบโซ่ขับแบบโรลเล่อร์ในระหว่างการทำงานส่วนประกอบของโซ่โรลเล่อร์จะเกิดการสึกหรอ เกิดความล้าตลอดจนแรงกระแทก การสึกหรอของโซ่เป็นปัจจัยสำคัญที่มีผลต่ออายุการใช้งานของโซ่ โดยเฉพาะโซ่ที่ใช้กับงานเกษตรกรรม ลักษณะการสึกหรอของโซ่จะเกิดขึ้นที่ส่วนของข้อต่อ ซึ่งเป็นส่วนของบูซและพิน ทั้งนี้มีผลเนื่องมาจากความสะอาดระหว่างส่วนประกอบของพิน และบูซไม่เพียงพอตลอดจนถ้าหากว่า การหล่อลื่นในส่วนช่องว่างระหว่างพิน และบูซไม่เพียงพอการสึกหรอของโซ่มีผลเองมากจากลักษณะการยืดตัวของโซ่ สาเหตุของการยืดตัวยาวของโซ่มีดังนี้
1. ความตึงของโซ่
2. พื้นที่ภาพฉายในส่วนที่รับแรงอัด
3. ลักษณะความสม่ำเสมอและการกระแทกอย่างรุนแรงของพื้นที่สัมผัส
4. ชนิดของการหล่อลื่นตลอดจนจำนวนครั้งของการหล่อลื่น
5. ความถี่รอยต่อของข้อโซ่
6. ฝุ่นละออง สิ่งสกปรก และสารแปลกปลอมที่มีผลต่อการขัดสี และทให้เกิดการสึกหรอขึ้น
แรงตึงที่เกิดขึ้นกับโซ่มีสาเหตุมาจาก
1. แรงดึงที่ต้องการสำหรับการถ่ายทอดกำลัง
2. แรงหนีศูนย์ (Centrifugal force) ที่เกิดขึ้นขณะการเคลื่อนที่ของโซ่รอบเฟืองโซ่
3. ลักษณะ (chordal action)
ลักษณะของแรงดึงที่ต้องการ เพื่อให้มีการส่งกำลังมีค่าเท่ากับแรงดึงด้านตึงของโซ่ ทั้งนี้โซ่ด้านหย่อนจะไม่มีแรงดึงเกิดขึ้นเลย
Kinematics ของโซ่โรลเล่อร์
ขณะที่โซ่โลเล่อร์เคลื่อนที่ผ่านรอยฟันเฟืองโซ่ (sprocket) ระยะรัศมีวัดจากจุดศูนย์กลางของฟันเฟืองถึงตำแหน่งกึ่งกลางของข้อโซ่มีลักษณะไม่สม่ำเสมอ ทั้งนี้เปรียบเทียบกับการวัดค่าลักษณะเดียวกันแต่เป็นการขับของสายพานโดยรอบล้อสายพาน ณ ตำแหน่งพิตซ์ของโซ่ในส่วนที่เคลื่อนที่เข้าหาฟันเฟืองโซ่ (sprocket) และตำแหน่งบริเวณส่วนที่เคลื่อนที่ออก
รูปที่ 2-11 แสดงลักษณะ chordal action
(ที่มา: https://slideplayer.com/slide/4986141/)
ฟันเฟืองโซ่จะมีลักษณะการเปลี่ยนแปลงค่ารัศมีลักษณะการยกตัวขึ้น และลดต่ำลงของพิตซ์ของข้อโช่แต่ละอันขณะที่เคลื่อนที่เข้าไปยังฟันเฟืองโซ่ถูกเรียกว่า “chordal action” ตามที่แสดงในรูปค่า chordal action และค่าการเปลี่ยนแปลงความเร็วมีค่าลดลงตามลักษณะจำนวนฟันของเฟืองโซ่ตัวเล็กเมื่อจำนวนฟันมีจำนวนเพิ่มมากขึ้น chordal action จะมีค่าน้อยมาก และไม่ต้องเอามาคิด สำหรับกรณีของฟันเฟืองโซ่มีจำนวนฟัน 25 ฟัน หรือมากกว่านี้
ถ้าฟันเฟืองโซ่ตัวขับ (driver sprocket) ถูกสมมุติว่าหมุนด้วยความเร็วสม่ำเสมอฟันเฟืองโซ่ตัวตาม (driven sprocket) หมุนด้วยความเร็วที่เปลี่ยนแปลงไป ทั้งนี้ความเร็วจะมีการเปลี่ยนแปลงในลักษณะเพิ่มสูงขึ้น หรือต่ำลงกว่าค่าเฉลี่ยเหตุที่เป็นเช่นนี้เพราะว่า เกิดลักษณะของ chordal action ขึ้นในการขับของโซ่และค่าความเร็วเฉลี่ยของฟันเฟืองโซ่ก็ไม่สามารถคำนวณหาได้จากค่าเส้นผ่านศูนย์กลางพิตซ์ (pitch diameter) แต่สามารถคำนวณหาได้จากค่าความยาวของโซ่ที่เคลื่อนที่ผ่านโดยรอบตัวฟันเฟืองโซ่ต่อหนึ่งหน่วยเวลา นั่นคือ
(2.19)
โดยที่
V คือ ค่าเฉลี่ยความเร็วในการเคลื่อนที่ของโซ่ (m/sec)
P คือ ค่าพิตซ์ของโซ่ (chain pitch)
N คือ จำนวนฟันบนเฟืองโซ่
RPM คือ ความเร็วรอบของฟันเฟืองโซ่ (rpm)
ในลักษณะเช่นเดียวกันค่าอัตราส่วนความเร็วของโซ่ก็ไม่สามารถคำนวณในเทอมของค่าเส้นผ่านศูนย์กลางพิตซ์แต่ต้องคำนวณจากความสัมพันธ์ดังแสดงในสมการ
(2.20)
สำหรับค่าความยาวของโซ่จะแสดงโดยค่าจำนวนพิตซ์ และเมื่อคูณค่าจำนวณพิตซ์กับค่าของความยาวพิตซ์ของข้อโซ่ก็ จะได้ค่าความยาวของโซ่ที่ต้องการสูตรใช้คำนวณหาค่าความยาว โดยประมาณของโซ่ขับในเทอมของพิตซ์ก็คือ
(2.21)
โดยที่
คือ ระยะระหว่างจุดศูนย์กลางของฟันเฟืองโซ่โดยบอกเป็นจำนวนพิตซ์
คือ จำนวนฟันของเฟืองอันใหญ่
คือ จำนวนฟันของเฟืองอันเล็ก
ค่าความยาวโดยประมาณที่คำนวณได้เมื่อเป็นเลขเศษส่วนจะต้องทำการปรับปรุงใหม่เพื่อให้ได้เลขจำนวนเต็ม ทั้งนี้แนะนำว่าตัวเลขจำนวนของพิตซ์ควรเป็นจำนวนเต็มเลขคู่ และระยะห่าง ระหว่างจุดศูนย์กลางฟันเฟืองขับทั้งสองอาจจะแก้ไขใหม่โดยใช้ค่าของความยาวโซ่ที่ได้รับการแก้ไขถูกต้องแลัวคำนวณโดยใช้สมการเพี่อหาค่าของ C ระยะห่างระว่างจุดศูนย์กลางของฟันเฟืองโซ่ที่ ละเอียดถูกต้องของโซ่ขับในเทอมของพิตซ์ดังแสดงสมการต่อไปนี้
(2.22)
เส้นผ่าศูนย์กลางพิตซ์ของฟันเฟืองโซ่มีความสัมพันธ์ดังนี้
(2.23)
โดยที่
P คือ ความยาวพิตซ์ของโซ่ (in)
N คือ จำนวนฟันบนเฟืองโซ่
วิธีการจัดตำแหน่งของโซ่ที่ควรแนะนำ
ตำแหน่งของเฟืองโซ่ตัวขับ (driver) และเฟืองโซ่ตัวตาม (driven) ตลอดจนแรงดึงด้านตึง และแรงดึงด้านหยอนของโซ่จะมีผลอย่างมากต่ออายุการใช้งานของโซ่นั้นหมายความว่าเราควรจะปรับความตึงของโซ่ให้อยู่ในตำแหน่งที่เหมาะสมต่อการใช้งาน ทั้งนี้สามารถทำได้โดยวิธีการติดตั้งเพลาด้านหนึ่งให้สามารถปรับความตึงของโซ่ได้ตามต้องการโดยการเปลี่ยนแปลงระยะห่างระหว่างจุดกึ่งกลางเพลาเช่นเดียวกันก็ทำได้โดยใช้ Idler Sprocket ที่ติดอยู่บนเพลาซึ่งสามารถเคลื่อนที่ได้ หรือใช้หลักการของสปริงที่กดลงบน sprocket ที่เป็นถึงข้อสำคัญดังต่อไปนี้
1.) การติดตั้งเฟืองโซ่ที่อยู่ในแนวระดับโซ่ด้านหย่อนควรจะอยู่ในตำแหน่งด้านล่าง
2.) การติดตั้งเมื่อระยะระหว่างจุดศูนย์กลางห่างกันมากโซ่ด้านหย่อนควรจะอยู่ในตำแหน่งส่วนล่าง มิฉะนั้นการสึกหรอของโซ่ อาจจะเกิดขึ้นอันมีผลเนื่องมากจากการขัดสีของโซ่ด้านบน และโซ่ตำแหน่งด้านล่าง
3.) การติดตั้งเมื่อระยะระหว่างจุดศูนย์กลางไม่ห่างกันมากนักโซ่ด้านหย่อนควรจะเป็นด้านล่างทั้งนี้เพราะว่าอาจจะเป็นสาเหตุที่ทำให้โซ่ด้านบนเมื่ออยู่ในลักษณะหย่อนถูกดันหลุดออกมาจากส่วนของฟันเฟืองโซ่ตัวเล็ก
4.) เมื่อโซ่ติดตั้งอยู่ในลักษณะแนวดึ่ง โซ่ควรจะติดตั้งอยู่ในลักษณะค่อนข้างตึง เพื่อป้องกันการหย่อนยานของโซ่ และป้องกันไม่ให้เกิดลักษณะการไม่ขบของโซ่บนฟันของเฟืองโซ่ตัวเล็ก
ที่มา: (ศิริศักดิ์, 2557)
2.11 ทฤษฎีด้านแบริ่งลูกปืน
แบริ่งโดยทั่ว ๆ ไปแล้วจะประกอบด้วยวงแหวน 2 วง, เม็ดลูกกลิ้ง, และรังแบริ่งกันรุนนั้นขึ้นอยู่กับทิศทางของแรงหลักที่กระทำ นอกจากนี้ยังขึ้นอยู่กับชนิดเม็ดลูกกลิ้งโดยแบ่งเป็นแบริ่งเม็ดกลม หรือแบริ่งเม็ดหมอนแบริ่งยังสามารถแบ่งออกไปได้อีกซึ่งแบ่งตามการออกแบบ หรือวัตถุประสงค์เฉพาะอย่างไปแบริ่งที่ใช้กันโดยทั่วไป และการกำหนดชื่อส่วนต่าง ๆ ของแบริ่ง
เมื่อเปรียบเทียบแบริ่งเม็ดลูกกลิ้งกับแบริ่งกาบแบริ่งเม็ดลูกกลิ้งมีข้อดีหลัก ๆ อยู่ดังนี้
- , การเปลี่ยน, การบำรุงรักษาทำได้ง่ายเนื่องจากโครงสร้างที่ล้อมรอบตลับแบริ่งไม่มีความซับซ้อนมาก
6. สามารถทำพรีโหลดกับแบริงส์เพื่อลดช่องว่างภายใน และเพิ่มความแข็งเกร็ง และยิ่งไปกว่านั้นแบริ่งในแต่ละแบบมีข้อดีโดดเด่นไปเฉพาะตัว
2.11.1 แบริ่งเม็ดทรงกระบอก
แบริ่งแบบนี้เม็ดลูกกลิ้งซึ่งมีลักษณะทรงกระบอกยาวจะสัมผัสเป็นเส้นตรงกับรางวิ่งมีความสามารถในการรับแรงในแนวรัศมีได้สูง และเหมาะกับงานความเร็วสูงลักษณะของแบริ่งมีหลายแบบทั้ง NU NJ NUP
N NF สำหรับแบริ่งแถวเดียว และ NNU NN สำหรับแบริ่งสองแถววงแหวนนอก และวงแหวนในของทุกแบบสามารถถอดแยกได้แบริ่งเม็ดทรงกระบอกบางแบบไม่มีโครง หรือสันขอบที่วงแหวนใน หรือวงแหวนนอกดังนั้นวงแหวนสามารถเคลื่อนที่ตามแนวแกนได้ เมื่อเทียบกับอีกวงหนึ่ง(เคลื่อนที่สัมพัทธ์กัน)ซึ่งสามารถใช้เป็นตลับลูกที่ไม่กำหนดตำแหน่งแบริ่งเม็ดทรงกระบอกไม่ว่าวงแหวนในหรือนอกมีโครง 2 ด้าน หรือวงแหวนหนึ่งมีหนึ่งด้านก็สามารถรับแรงในแนวแกนได้ทิศทางเดียวแบริ่งเม็ดทรงกระบอก 2 แถวมีความแข็งเกร็งแนวรัศมีสูง และใช้กับเครื่องมือกลที่มีความเที่ยงตรงสูงปกติทั่วไปแล้วจะใช้รังเหล็ก หรือทองเหลืองกลึงขึ้นรูปแต่ในบางครั้งก็ใช้รังโพลียามายด์หล่อขึ้นรูป
รูปที่ 2-12 แบริ่งเม็ดทรงกระบอก
(ที่มา : http://th.tedin-bearings.com/cylindrical-roller-bearings)
2.11.2 แบริ่งเม็ดโค้งกันรุน
แบริ่งชนิดนี้มีรางวิ่งโค้งหนึ่งรางอยู่ที่แหวนรองตัวเรือน และมีเม็ดลูกกลิ้งรูปโค้งวางเรียงอยู่โดยรอบรางวิ่งที่มีลักษณะโค้งของแหวนรองตัวเสื้อนี้นั้นทำให้แบริ่งปรับแนวได้เอง และสามารถรับแรงในแนวแกนที่สูงมาก ๆได้ ทั้งยังสามารถรับแรงในแนวรัศมีได้ปานกลางในขณะที่รับแรงในแนวแกนอยู่ด้วยโดยทั่วไปใช้รังเหล็กปั๊มขึ้นรูป หรือรังทองเหลืองกลึงขึ้นรูป
รูปที่ 2-13 แบริ่งเม็ดโค้งกันรุน
(ที่มา: http://bangkaebearing.com/)
2.11.3 แบริ่งเม็ดกลมปรับแนวได้เอง
วงแหวนในมีสองรางวิ่ง และวงแหวนนอกมีรางวิ่งลักษณะโค้งอยู่หนึ่งรางวิ่งซึ่งจุดศูนย์กลางของความโค้งเป็นจุดเดียวกับแนวแกนของแบริ่ง นั่นคือแนวแกนของวงแหวนในเม็ดลูกกลิ้ง และรังสามารถหันเหได้รอบศูนย์กลางของแบริ่ง ดังนั้น การเยื้องแนวมุมเล็ก ๆ น้อย ๆ ของเพลา และตัวเสื้อที่ซึ่งมีสาเหตุมาจากการกลึงไส หรือการติดตั้งที่ไม่ดีพอนั้นสามารถแก้ไขได้โดยอัตโนมัติแบริ่งชนิดนี้มีรูเพลาเอียงไว้สำหรับใช้กับปลอกปรับขนาด
รูปที่ 2-14 แบริ่งเม็ดกลมปรับแนวได้เอง
(ที่มา: http://bangkaebearing.com/)
2.11.4 แบริ่งเม็ดกลมสัมผัสเชิงมุมสี่จุด
แบริ่งสัมผัสเชิงมุมสี่จุดนั้นวงแหวนใน และวงแหวนนอกแยกออกจากกันได้ เนื่องจากในวงแหวนในแยกออกจากกันในระนาบรัศมีสามารถรับแรงในแนวแกนได้สองทิศทางลูกกลิ้งทำมุม 35 องศากับวงแหวนแต่ละวงแบริ่งสัมผัสเชิงมุมสี่จุ เพียงหนึ่งตลับเท่านั้นที่สามารถทดแทนแบริ่งเม็ดกลมสัมผัสเชิงมุมแถวเดียวที่ประกบแบบหน้าชนหน้า หรือหลังชนหลังรังที่ใช้ทั่วไปมักเป็นทองเหลืองกลึงขึ้นรูป
รูปที่ 2-15 แบริ่งเม็ดกลมสัมผัสเชิงมุมสี่จุด
(ที่มา : https://www.xn--12cn3bpcei6c2ab4d2dhc7f3a1w6c.com/)
2.11.5 แบริ่งเม็ดกลมกันรุนทิศทางเดียว
แบริ่งเม็ดกลมกันรุนรับแรงทิศทางเดียวประกอบด้วยวงแหวนที่มีลักษณะคล้ายแหวนรองมีร่องรับแรงทิศทางเดียวรางวิ่งวงแหวนที่สวมติดกับเพลาเรียกว่า แหวนรองเพลา หรือวงแหวนในส่วนวงแหวนที่สวมติดกับตัวเสื้อ เรียกว่าวงแหวนรองตัวเสื้อ หรือวงแหวนนอก สำหรับแบริ่งกันรุนเม็ดกลมกันรุนรับแรงสองทิศทางนั้นจะมีวงแหวนสามวง วงแหวนกลางจะสวมติดกับเพลายังมีแบริ่งเม็ดกลมกันรุนที่มีแหวนรองปรับแนวได้เองอีกด้วยซึ่งแหวนนี้จะอยู่ส่วนล่างของแหวนรองตัวเสื้อเพื่อรับการเยื้องแนวของเพลา หรือการติดตั้งที่ไม่พอดีโดยปกติแล้วจะใช้รังเหล็กปั๊มขึ้นรูปในแบริ่งขนาดเล็ก และรังกลึงขึ้นรูปใช้กับแบริ่งขนาดใหญ่
รูปที่ 2-16 แบริ่งเม็ดกลมกันรุนทิศทางเดียว
(ที่มา: http://bangkaebearing.com/)
2.11.6 แบริ่งเม็ดกลมสัมผัสเชิงมุมสองแถว
แบริ่งเม็ดกลมสัมผัสเชิงมุมสองแถวนั้นโดยพื้นฐานแล้วคือแบริ่งเม็ดกลมสัมผัสเชิงมุมแถวเดียวติดตั้งแบบหลังชนหลังต่างกันที่แบบสองแถวนั้นมีวงแหวนในหนึ่งวง วงแหวนนอกหนึ่งวง และแต่ละวงมีรางวิ่งของตัวเองแบริ่งแบบนี้สามารถรับแรงแนวแกนได้สองทิศทาง
รูปที่ 2-17 แบริ่งเม็ดกลมสัมผัสเชิงมุมสองแถว
(ที่มา: http://thninte.com/)
2.11.7 แบริ่งเม็ดโค้ง
แบริ่งชนิดนี้เม็ดแบริ่งมีลักษณะคล้ายถังไม้โค้ง หรือเรียกว่า barrel shaped roller อยู่ระหว่าง วงแหวนใน ซึ่งมีสองรางวิ่ง และวงแหวนนอกซึ่งมีหนึ่งรางวิ่งการที่ศูนย์กลางความโค้งของผิวหน้ารางวิ่งของวงแหวนนอก เป็นจุดเดียวกับแกนของแบริ่งทำให้แบริ่งปรับแนวได้เอง ดังนั้น หากเพลา หรือแบริ่งเกิดโก่งตัว หรือเกิดการเยื้องแนวจากแนวแกนก็จะสามารถปรับตัวเองได้โดยอัติโนมัติทำให้ไม่เกิดแรงที่สูงเกินไปมากระทำต่อแบริ่ง แบริ่งเม็ดโค้งนั้นไม่เพียงแต่สามารถรับแรงแนวรัศมีได้สูง แต่ยังสามารถรับแรงในแนวแกนได้สอง ทิศทางอีกด้วยมีความสามารถในการรับแรงแนวรัศมีได้อย่างดีเยี่ยม และเหมาะสำหรับการใช้งานที่มีแรงกระทำ หรือกระแทกสูง ๆบางแบบอาจมีรูในเอียง ซึ่งอาจใช้ติดตั้งโดยตรงบนเพลาเอียง หรือติดตั้งบนเพลาตรงโดยใช้ปลอกปรับขนาด หรือปลอกสวมปกติใช้เหล็กปั๊มขึ้นรูปรังโพลียามายด์หล่อ และรังทองเหลืองกลึงขึ้นรูป
รูปที่ 2-18 แบริ่งเม็ดโค้ง
ที่มา : (http://www.knbearings.com/)
2.11.8 แบริ่งประกบคู่
การนำแบริ่งแนวรัศมี 2 ตลับมารวมกันในการใช้งานเราเรียกว่าการประกบคู่ ซึ่งโดยทั่วไปจะใช้แบริงเม็ดกลมสัมผัสเชิงมุม หรือแบริ่งเทเปอร์มาทำการประกอบการประกบคู่ทำได้ทั้งแบบหน้าชนหน้า ซึ่งวงแหวนนอกหันหน้าชนกัน (แบบ DF) แบบหลังชนหลัง (แบบ DB) หรือหน้าเรียงตามกันในทิศทางเดียว (DT) การประกบแบบ DF และ DB สามารถรับแรงแนวรัศมีและแนวแกนได้สองทิศทาง แบบ DT จะใช้เมื่อมีแรงใน แนวแกนแรงหนึ่งซึ่งมีค่าสูงมากในทิศทางเดียวจึงจำเป็นต้องกำหนดให้รับแรงเท่ากันในแบริ่งแต่ละตัว
รูปที่ 2-19 แบริ่งประกบคู่
(ที่มา : http://thninte.com/)
2.11.9 แบริ่งเทเปอร์
แบริ่งชนิดนี้ใช้เม็ดลูกกลิ้งเป็นรูปกรวยมีตัวนำร่อง คือโครงของขอบวงแหวนด้านในแบริ่งเทเปอร์สามารถรับแรงแนวรัศมีได้สูง และรับแรงในแนวแกนได้ทิศทางเดียวในอนุกรม HR มีการเพิ่มขนาด และ
จำนวนเม็ดลูกกลิ้งทำให้สามารถรับแรงได้สูงขึ้นไปอีก การใช้งานโดยทั่วไปมักจะใช้เป็นคู่คล้ายกับแบริ่งสัมผัสเชิงมุมแถวเดียว ซึ่งจะมีการปรับช่องว่างภายในแบริ่งให้เหมาะสมโดยการปรับระยะแนวแกนระหว่างวงแหวนใน หรือวงแหวนนอกของแบริ่งที่ประกบกันทั้ง 2 ตลับ วงแหวนใน และวงแหวนนอกสามารถแยกประกอบได้อย่างอิสระ แบริ่งชนิดนี้แบ่งออกเป็น 3 แบบตามมุมสัมผัสได้ดังนี้ มุมปกติ มุมปานกลาง และมุมชัน อีกทั้งยังมีแบบสองแถว และสี่แถวให้เลือกใช้อีกด้วยรังที่ใช้ โดยมากจะเป็นรังเหล็กปั๊มขึ้นรูป
รูปที่ 2-20 แบริ่งเทเปอร์
(ที่มา : http://www.ftiebusiness.com/)
2.11.10 แบริ่งเม็ดกลมสัมผัสเชิงมุม
แบริ่งแบบนี้สามารถรับแรงในแนวรัศมี และแนวแกนได้ทิศทางเดียวมุมสัมผัสมีทั้ง 15 25 30 40 องศา มุมสัมผัสยิ่งมากก็ยิ่งสามารถรับแรงในแนวแกนได้มากค่ามุมสัมผัสน้อยเหมาะสำหรับงานที่ต้องการความเร็วสูงโดยทั่วไปมักใช้แบริ่งชนิดนี้เป็นคู่โดยจะมีการปรับช่องว่างภายในอย่างเหมาะส มักใช้รังเหล็ก
สำหรับงานทั่วไปแบริ่งที่มีความเที่ยงตรงสูงจะมีมุมสัมผัสน้อยกว่า 30 และใช้รังโพลียามายด์
รูปที่ 2-21 แบริ่งเม็ดกลมสัมผัสเชิงมุม
(ที่มา : https://www.xn--12cn3bpcei6c2ab4d2dhc7f3a1w6c.com/)
2.11.11 แบริ่งเม็ดเข็ม
แบริ่งประกอบด้วยลูกกลิ้งเม็ดเรียวยาวมีขนาดความยาวประมาณ 3 ถึง 10 เท่าของขนาดเส้นผ่านศูนย์กลาง อัตราส่วนของเส้นผ่านศูนย์กลางนอกต่อเส้นผ่านศูนย์กลางวงกลมในมีค่าน้อยมีความสามารถในการแรงในแนวรัศมีค่อนข้างสูงแบริ่งชนิดนี้มีหลายแบบให้เลือก โดยมากไม่มีวงแหวนในแบริ่งแบบ drawn-cup นั้นมีวงแหวนนอกเป็นเหล็กปั๊ม ส่วนแบบ solid type ผลิตจากเหล็กกลึงขึ้นรูปยังมีแบริ่งที่เรียกโดยทั่วไปว่า
แบริ่งกรงนรก ซึ่งจะไม่มีวงแหวนทั้งในและนอกมาด้วยมีเพียงรังและเม็ดลูกกลิ้งเท่านั้นรังเป็นเหล็กปั๊มขึ้นรูป แต่ในบางแบบจะไม่มีรัง
รูปที่ 2-22 แบริ่งเม็ดเข็ม
(ที่มา : http://www.thninte.com/)
2.11.12 แบริ่งแม็กนีโต
ร่องรางวิ่งของแบริ่งแม็กนีโตจะแคบกว่าของแบริ่งเม็ดกลมแถวเดียวเล็กน้อย วงแหวนนอกมีบ่าอยู่เพียงด้านเดียวซึ่งอาจแยกวงแหวนนอกออกได้ จุดนี้จะทำให้การติดตั้งทำได้ง่าย โดยทั่วไปใช้แบริ่งชนิดนี้ 2 ตัวมาทำการประกบคู่แบริ่งแม็กนีโตเป็นแบริ่งขนาดเล็กมีขนาดเส้นผ่านศูนย์กลางวงแหวนในประมาณ 4 มม. ถึง 20 มม. โดยส่วนใหญ่ใช้ในแม็กนีโตขนาดเล็กไจโรสโคป และอุปกรณ์ต่าง ๆ โดยมากใช้รังทองเหลือง
รูปที่ 2-23 แบริ่งแม็กนีโต
(ที่มา : http://www.thninte.com/)
2.11.13 แบริ่งเม็ดกลมล่องลึกแถวเดียว
แบริ่งเม็ดกลมร่องลึกแถวเดียวเป็นแบริ่งที่ธรรมดาสามัญมากที่สุดมีการนำไปใช้งานอย่างกว้างขวางร่องรางวิ่งของทั้งวงแหวนใน และนอกมีลักษณะเป็นวงโค้ง ซึ่งรัศมีโตกว่าของเม็ดบอลนอกเหนือจากแรงในแนวรัศมีที่รับได้แล้วยังสามารถรับแรงในแนวแกนได้ทั้งสองทิศทางด้วยในงานที่ต้องการความเร็วสูง และสูญเสียพลังงานต่ำแบริ่งชนิดนี้จะเหมาะสมมาก เนื่องจากแรงบิดต่ำแบริ่งนี้มีทั้งแบบเปิดฝาเหล็ก ซีลยาง ซึ่งอาจติดตั้งทั้งสองด้านของแบริ่งโดยภายในบรรจุจาระบีเอาไว้ ในบางครั้งอาจมีแหวนล็อคอยู่ที่ผิวนอกวงแหวนนอกรังที่ใช้โดยมากเป็นรังเหล็ก
รูปที่ 2-24 แบริ่งเม็ดกลมล่องลึกแถวเดียว
(ที่มา : https://www.tps.co.th/)
บทที่ 3
อุปกรณ์และวิธีการ
3.1 อุปกรณ์
เป็นที่ยอมรับกันโดยทั่วไปว่าเครื่องมือเป็นปัจจัยสำคัญอย่างหนึ่งในการปฏิบัติงานช่าง เพราะเครื่องมือเป็นสิ่งที่ช่วยผ่อนแรงในการทำงาน และช่วยให้งานสำเร็จตามเป้าหมายผลงานที่ออกมาดี สวยงาม เป็นที่ต้องการของผู้ใช้โดยเราต้องรู้จักการใช้เครื่องมืออย่างถูกวิธี และเหมาะสมกับชนิดของงาน ฉะนั้นในการใช้เครื่องมือจึงถือเป็นกระบวนการอย่างหนึ่งที่สำคัญในการทำงานช่าง โดยเครื่องมือในงานช่างพื้นฐานโดยทั่วไปมีมากมายหลายชนิด
3.1.1 มอเตอร์ไฟฟ้ากระแสตรง (Direct Current Motor)
มอเตอร์เป็นอุปกรณ์ไฟฟ้าชนิดหนึ่ง มีหลักการทำงาน คือ เปลี่ยนพลังงานไฟฟ้าเป็นพลังงานกล และมีลักษณะโครงสร้างคล้ายเครื่องกำเนิดไฟฟ้ากระแสตรง
หลักการของมอเตอร์ (Motor Principle) เมื่อมีกระแสไฟฟ้าไหลผ่านสนามแม่เหล็กจะเกิดทิศทางของแรงที่เกิดขึ้นในมอเตอร์กฎมือซ้ายของเฟรมมิ่ง ดังนั้นจะได้
3.1.2 สเต็ปปิ้งมอเตอร์ Stepping Motor
เป็นมอเตอร์ที่ขับเคลื่อนด้วยพัลส์ ลักษณะการขับเคลื่อนจะหมุนรอบแกนได้ 360 องศา แบบไม่ต่อเนื่องแต่มีลักษณะเป็นสเต็ป โดยแต่ละสเต็ปจะขับเคลื่อนได้ 1, 1.5, 1.8 หรือ 2 องศา ขึ้นอยู่กับโครงสร้างของมอเตอร์ จากลักษณะของมุมโรเตอร์หมันกับกระแสไฟฟ้าที่ป้อนแก่เฟสต่าง ๆ จะสามารถสั่งงานสเต็ปปิ้งมอเตอร์หมุนได้ โดยการใช้งานเลือกต่อแบบฟูลสเต็ป 1 เฟส ซึ่งโครงสร้างการทำงานของสเต็ปปิ้งมอเตอร์มีลักษณะ ดังแสดงในภาพที่ 1 ประกอบด้วยขดลวดสเตเตอร์ 4 ขดลวดสำหรับชนิด 4 เฟส ล้อมรอบแกนโรเตอร์ที่เป็นแม่เหล็กถาวร
การคำนวณ stepping motor
การหมุนของ motor จะหมุนเป็นวงกลม ดังนั้นวงกลม 1 วง มี 360 องศา motor
ถ้าเราต้องต้องการทราบว่าในหนึ่งรอบการหมุนของ motor หรือ 360 องศา controller จะต้องจ่ายสัญญาณ pulse กี่ pulse ก็จะหาได้ดังนี้
3.1.3 ลีดสกรู (Lead Screw)
มีหลักการทำงาน คือ การเคลื่อนที่ในแนวแกนการหมุนเปลี่ยนเป็นการเคลื่อนที่ในแนวเชิงเส้นหรือใช้แรงบิดเปลี่ยนเป็นแรงผลัก มีข้อดีในการทำงาน มีความแม่นยำ และมีประสิทธิภาพสูง
| รูปที่ 3- 1 ลีดสกรู (LEAD SCREW) |
(ที่มา : https://www.thk.com/)
แรงบิดของลีดสกรู
g: ค่าความเร่งเนื่องจากแรงโน้มถ่วง 9.8 (
F: แรงจากภายนอก
W: โหลดน้ำหนัก
µ : สัมประสิทธิ์แรงเสียดทานของหน้าสัมผัส
P: ระยะของหลีดสกรู
T: แรงบิด
3.1.4 เครื่องเจาะ
งานเจาะจัดเป็นกระบวนการผลิตขั้นพื้นฐาน ที่มีลักษณะการทำงานแบบง่าย ๆ ไม่ยุ่งยากซับซ้อน แต่มีความสำคัญมาก โดยเฉพาะอย่างยิ่งในงานโลหะ การเจาะเป็นกระบวนการตัดเฉือนวัสดุงานออก โดยใช้ดอกสว่าน รูที่ได้จากการเจาะด้วยดอกสว่านจะมีลักษณะเป็นรูกลม เช่น รูยึดเหล็กดัดประตูหน้าต่างบานพับ กลอนประตูบ้าน ตลอดจนชิ้นส่วนรถจักรยาน รถยนต์ต่าง ๆ มีรูสำหรับการจับยึดมากมาย
ในการเจาะรูบนชิ้นงานสามารถทำได้ด้วยเครื่องจักรกลหลายชนิด เช่น การเจาะรูบนเครื่องกลึง เครื่องกัด เป็นต้น แต่ในการเจาะรูที่ประหยัด รวดเร็ว และนิยมใช้กันมากที่สุด คือ การเจาะรูด้วยเครื่องเจาะ ดังนั้น เครื่องจักรกลพื้นฐานที่จะกล่าวในบทนี้ คือ เครื่องเจาะ
รูปที่ 3-2 เครื่องเจาะ
3.1.5 เครื่องตัดโลหะไฟเบอร์เล็ก
เครื่องตัดเหล็กไฟเบอร์ (Steel Cutter/Abrasive Disc Type) ใช้งานตัดเหล็กเส้นกลมข้ออ้อยมเหล็กแป๊ปและท่อต่าง ๆ งานทั่วไป และงานก่อสร้าง โดยขนาดสูงสุดที่ตัดได้ 16” แรงดันไฟฟ้า 220 V
รูปที่ 3-3 เครื่องตัดโลหะไฟเบอร์เล็ก
(ที่มา: https://www.shopat24.com/)
3.1.6 มอเตอร์หินเจียร
เครื่องเจียรเป็นเครื่องมือที่ใช้ในการตกแต่งพื้นผิวให้เรียบหรือมีขนาดตามความต้องการซึ่งพื้นผิวนั้นต้องมีขนาไม่มากนัก สามารถทำการเจียระไนพื้นที่ที่เป็นมุมแคบได้ เช่น การเจียรอบผิว รอยเชื่อม
รูปที่ 3-4 มอเตอร์หินเจียร
3.1.7 สว่านมือ
สว่านเป็นเครื่องมือชนิดหนึ่ง ใช้สำหรับเจาะรูบนวัสดุหลายประเภท เป็นเครื่องมือที่ใช่บ่อยในงานไม้และงานโลหะประกอบด้วยส่วนสำคัญคือดอกสว่านที่หมุนได้ดอกสว่านยึดอยู่กับเดือยด้านหนึ่งของสว่าน และถูกกดลงไปบนวัสดุที่ต้องการจากนั้นจึงถูกทำให้หมุน ปลายดอกสว่านจะทำงานเป็นตัวตัดเจาะวัสดุ กำจัดเสษวัสดุระหว่างการเจาะ (เช่น ขี้เลื่อย)
รูปที่ 3-5 สว่านมือ
(ที่มา : https://th.aliexpress.com/)
3.1.8 ปากกาจับชิ้นงาน
ปากกาจับชิ้นงาน (Bench Vise) เป็นเครื่องมือสำหรับประกอบหรือใช้สำหรับการทำงาน โดยใช้จับชิ้นงานให้แน่นเพื่อสะดวกต่อการปฏิบัติติงานอื่น เช่น จับโลหะ ไม้ พลาสติกอื่น ๆ ในการตัดเจาะ ตัด ตอก หรือตะไบ เป็นต้น
รูปที่ 3-6 ปากกาจับชิ้นงาน
(ที่มา : ttps://www.wongtools.com)
3.1.9 เครื่องตัดโลหะแผ่น แบบใช้เท้าเหยียบ
การตัดเฉือนเป็นกระบวนการตัดวิธีหนึ่งเพื่อตัดชิ้นงานให้ขาดออกจากกัน ลักษณะของการตัดนั้นจะต้องตัดให้ขาดเป็นเส้นตรงแต่เพียงอย่างเดียว ชิ้นงานที่ถูกตัดให้ขาดด้วยกรรมวิธีนี้จะเรียกชิ้นงานนั้นว่าแผ่นชิ้นงานหรือไม่ก็ได้ ขึ้นอยู่กับจุดประสงค์ในการนำไปใช้งาน การตัดแบบเฉือนนี้ชิ้นงานจะถูกนำไปตัดบนเครื่องจักรที่เรียกว่า เครื่องตัดโลหะแผ่น (Square shears) ซึ่งเครื่องตัดโลหะแผ่นนี้อาจจะเป็นประเภทใช้มือโยก ใช้เท้าเหยียบ หรือใช้พลังงานอย่างอื่นช่วยตัดก็ได้ ที่ตัวเครื่องจะมีแผ่นใบมีดขนาดยาวตั้งแต่ 50 มม. ถึง 2000 มม. อยู่ 2 อันทำหน้าที่เป็นตัวตัดชิ้นงานและมีเกจสำหรับวัดความยาวของชิ้นงานที่จะตัดอยู่บนตัวเครื่องด้วย เครื่องตัดโลหะแผ่นแบบนี้มีขีดจำกัดอยู่อย่างหนึ่งคือ จะตัดชิ้นงานออกมาเป็นเส้นตรงๆ แต่เพียงอย่างเดียว
3.1.10 ตะไบขัดชิ้นงาน
ตะไบเป็นเครื่องมือที่ทำจากเหล็กแข็งใช้ในการขัดตกแต่งผิวหรือปาดหน้าชิ้นงานที่ต้องการขจัดเนื้อโลหะทิ้งไปไม่มากนัก ตะไบมีรูปร่างลักษณะหลายแบบและหลายขนาด เช่น ตะไบกลม ตะไบเหลียม ตะไบสามเหลี่ยม เป็นต้น
3.1.11 ตลับเมตร
ตลับเมตร คือเครื่องมือวัดชนิดหนึ่งที่มีสายวัดเก็บอยู่ในตลับอย่างมิดชิด ทำให้สะดวกในการนำติดตัวไปใช้งานได้ตลออดเวลา ตลับเมตรใช้ในการวัดหาระยะหรือตรวจสอบขนาดของวัสดุ ชิ้นงาน เนื่องจากตรงหัวสายวัดของตลับเมตรมีขอเกี่ยว ซึ่งใช้เป็นที่เกาะยึดกับขอบของชิ้นงานที่ต้องการวัด ทำให้การดึงสายวัดออกจากตลับเพื่อใช้ในการวัดระยะหรือตรวจสอบขนาดของวัสดุ หรือชิ้นงานได้สะดวกซึ่งผู้ใช้ควรเรียนรู้เรื่องสำคัญของตลับเมตร
3.1.12 ที่วัดระดับน้ำ
ที่วัดระดับน้ำเป็นอุปกรณ์ที่ใช้วัดระดับน้ำพื้นผิวให้อยู่ในระดับเดียวกัน
3.2 ขั้นตอนและการดำเนินงานสร้าแบบจำลองเครื่องดูดถุงและลำเลียงในโรงงานอุตสาหกรรม
3.2.1 ทำการออกแบบโครงสร้าง
โดยจะวางชุดสายพานลำเลียงไว้บนอะลูมิเนียมโปรไฟล์ ซึ่งจะถูกขับเคลื่อนด้วยลีดสกรู และปากทางเข้าสินค้าใช้ลูกกลิ้งลำเลียงที่ได้ออกแบบไว้ ในโปรแกรม Solid Work
รูปที่ 3- 7 Model ที่ออกแบบใน Solid work
3.2.2 การเลือกมอเตอร์
ในโครงงานชิ้นนี้ จะใช้มอเตอร์ทั้งหมด 3 ตัว ตัวที่
1) มอเตอร์ไฟฟ้ากระแสตรง (Direct Current Motor) 220 โวลต์ ขนาด 6 วัตต์ โดยเป็นตัวที่ใช้ขับเคลื่อนสายพาน
2) มอเตอร์สเต็ปปิ้ง (Stepping Motor) ในส่วนนี้จะใช้ขีบลีดสกรู
3) มอเตอร์ไฟฟ้ากระแสตรง (Direct Current Motor) ขนาด 12 โวลต์ 6000 รอบต่อนาที ในส่วนนี้ใช้ขับลูกกลิ้ง
รูปที่ 3-8 มอเตอร์ไฟฟ้ากระแสตรง 220 โวลต์
รูปที่ 3-9 มอเตอร์ stepping motor
3.2.3 ตัดอะลูมิเนียมโปรไฟล์ขนาดเท่ากับที่ได้ออกแบบไว้ ดังนี้
1 ) อะลูมีเนียมโปรไฟล์ขนาด 30 X 30 มิลลิเมตร ยาว 30 เซนติเมตร จำนวน 6 ชิ้น
2 ) อะลูมีเนียมโปรไฟล์ขนาด 30 X 30 มิลลิเมตร ยาว 13 เซนติเมตร จำนวน 4 ชิ้น
รูปที่ 3-10 ขั้นตอนการตัดอะลูมิเนียมโปรไฟล์
3.2.4 ประกอบโครงของตัวเครื่อง
โดยใช้แบ็คเก็ตเป็นตัวยึดกับอะลูมิเนียมโปรไฟล์ และทำการประกอบโครง
รูปที่ 3-11 แบ็คเก็ตขนาด 30 มิลลิเมตร
รูปที่ 3-12 ตัวโครงของเครื่องที่ทำการยึดด้วยบัคเก็ตแล้ว
3.2.5 ทำการติดตั้งลีดสกรู
ที่มีระยะพิตซ์ 1 มิลลิเมตร เส้นผ่านศูนย์กลาง 8 มิลลิเมตร ยาว 300 มิลลิเมตร
3.2.6 ทำการติดตั้งชุดสายพานซึ่งมีความกว้าง 20 เซติเมตร กว้าง 26 เซนติเมตร และมีน้ำหนัก 4.15 กิโลกรัม โดยติดตั้งบนลีดสกรู และใช้สเต็ปปิ้งมอเตอร์เป็นตัวขับ
รูปที่ 3-13 ขนาดของสายพาน
รูปที่ 3-14 ติดตั้งสายพานบนโครงที่ได้ประกอบไว้
รูปที่ 3-15 ติดตั้ง Stepping motor เพื่อขับลีดสกรู
3.2.7 ขั้นตอนการออกแบบปากดูดถุงและทำการยึดกับตัวสายพาน
แผ่นที่ใช้ยึดกับลูกกลิ้งจะใช้แผ่นเหล็ก ทำการเจาะรูใส่แบริ่ง และขันน็อตเพื่อใส่สปริงความยาว 6 เซนติเมตร เมื่อถุงแป้งผ่านเข้ามาทางลูกกลิ้งสปริงจะยืดตัว ขณะเดียวกันเมื่อไม่มีถุงแป้งสปริงจะหดตัว ข้อดี ของการติดสปริงก็คือ เพิ่มแรงกดถุง และช่วยให้ประสิทธิภาพในการดูดถุงมากขึ้น
รูปที่ 3-16 แผ่นเหล็กและแบริ่ง ที่จะทำการใส่ลูกกลิ้ง
3.2.8 ทำการ ติดตั้งมอเตอร์กระแสตรง และใส่เฟืองโซ่เพื่อขับลูกกลิ้ง
รูปที่ 3-18 ขั้นตอนติดตั้ง Stepping Motor
- ทำโครงใช้สำหรับวางถุง
อะลูมีเนียมโปรไฟล์ขนาด 30 X 30 มิลลิเมตร ยาว 40 เซนติเมตร จำนวน 2 ชิ้น
อะลูมีเนียมโปรไฟล์ขนาด 30 X 30 มิลลิเมตร ยาว 10 เซนติเมตร จำนวน 2 ชิ้น
อะลูมีเนียมโปรไฟล์ขนาด 30 X 30 มิลลิเมตร ยาว 13 เซนติเมตร จำนวน 1 ชิ้น
รูปที่ 3-19 โครงที่ใช้รองรับถุง
3.3 แผนผังการสั่งงานลีดสกรู (lead screw)
| รูปที่ 3-20 แผนผังการสั่งงานของลีดสกรู (lead screw) |
การสั่งงานลีดสกรู (lead screw) โดยทำการเขียนโปรแกรม ตามภาคผนวก ข. จากนั้นสั่งงานผ่านแผงอาดูโน (Arduino) แล้วทำการต่อแผงอาดูโน่ (Arduino) เข้ากับ Driver Board ซึ่งเป็นตัวทำงานให้อุปกรณ์ที่เชื่อมต่อกับเครื่องคอมพิวเตอร์โดยเฉพาะ แล้วต่อเข้ากับ มอเตอร์ไฟฟ้ากระแสตรง ขนาด 12 โวลต์ และต่อเข้ากับสเต็ปปิ้งมอเตอร์ (Stepping Motor) เพื่อทให้ลีดสกรูเคลื่อนที่ไปข้างหน้าและข้างหลัง ตามคำสั่งที่เราสั่งงานขึ้นมา
3.4 แผนผังการทำงานของระบบ
บทที่ 4
ผลการทดลอง
4.1 วัตถุประสงค์ของการทดลอง
ในบทนี้จะทำการศึกษาหาระยะตำแหน่งของลีดสกรู และการปรับแผ่นวางถุงเพื่อให้ได้ระดับที่จะทำให้ลูกกลิ้งดูดถุงเข้าไปได้
4.2 ขั้นตอนการทำงานของกระบวนการ
ขั้นตอนกระบวนการในการทำงาน คือ นำถุงแป้งไปวางไว้บนแผ่นเหล็ก แล้วทำการปรับระยะของลีดสกรูกับระยะแท่นวางถุงแป้งที่ระดับต่าง ๆกัน ลีดสกรูทำงานโดยสั่งงานผ่านโปรแกรมทำการปรับระยะไปกลับและระยะดีเลย์ โดยในการทดลองจะแบ่งเป็น 2 รอบ คือ รอบที่ 1 จะใช้ถุงแป้งเพียง 1 ถุง และ ครั้งที่ 2 จะใช้ถุงแป้ง 2 ถุง
4.3 ผลการทดลอง
เมื่อทำการทดลอง ที่ระยะและระดับต่าง ๆกัน มีทั้งที่ดูดเข้าและไม่เข้า อธิบายระยะที่ทดลองตามตาราง ที่ 4.1 และ 4.2
ตารางที่ 4. 1 แสดงผลการทดลองโดยใช้ถุงจำนวน 1 ถุง ที่ระดับต่าง ๆกัน
| จำนวนถุง 1 ชั้น | ||||
|
ระยะสูงจากฐาน (cm.) |
ระยะห่างจาก housing (cm.) |
ระยะเวลาดีเลย์ (s) | ผลที่ได้ | |
| 35 | 8 | 6 | ✗ | |
| 6 | 6 | ✗ | ||
| 4 | 6 | ✗ | ||
| 37 | 8 | 6 | ✗ | |
| 6 | 6 | ✗ | ||
| 4 | 6 | ✗ | ||
| 39 | 8 | 6 | ✗ | |
| 6 | 6 | ✗ | ||
| 4 | 6 | ✗ | ||
| 40 | 8 | 6 | ✗ | |
| 6 | 6 | ✗ | ||
| 4 | 6 | ✓ |
ตารางที่ 4. 2 แสดงผลการทดลองโดยใช้ถุง จำนวน 2 ถุง ที่ระดับต่าง ๆกัน
| จำนวนถุง 2 ชั้น | ||||
|
ระยะสูงจากฐาน (cm.) |
ระยะห่างจาก housing (cm.) |
ระยะเวลาดีเลย์ (s) | ผลที่ได้ | |
| 35 | 8 | 6 | ✗ | |
| 6 | 6 | ✓ | ||
| 4 | 6 | ✓ | ||
| 37 | 8 | 6 | ✗ | |
| 6 | 6 | ✓ | ||
| 4 | 6 | ✓ | ||
| 39 | 8 | 6 | ✗ | |
| 6 | 6 | ✓ | ||
| 4 | 6 | ✓ | ||
| 40 | 8 | 6 | ✗ | |
| 6 | 6 | ✗ | ||
| 4 | 6 | ✗ |
หมายเหตุ เครื่องหมาย ✓ หมายถึง ถุงแป้งดูดผ่านเข้าไปได้
เครื่องหมาย ✗ หมายถึง ถุงแป้งดูผ่านเข้าไปไม่ได้
4.4ถุงแป้งที่ใช้ในการทดลอง
มีขนาด 15 x 20 เซนติเมตร มีน้ำหนัก 500 กรัม
การทดลองครั้งมีเป้าหมายในการออกแบบกระบวนการผลิต เพื่อให้การดูดถุงและเคลื่อนย้ายถุงมีความแม่นยำ รวดเร็ว เพื่อตอบสนองความต้องการด้านอุตสาหกรรม ทำให้สามารถลดต้นทุนด้าน ค่าแรงงาน ใช้เวลาผลิตน้อยลง และลดปัญหาเรื่องสินค้าที่ได้รับความเสียหายได้มาตรฐานตามที่ต้องการ จึงทำการทดลองครั้งนี้ขึ้นมา
4.5ตัวอย่างขั้นตอนการทดลอง
| รูปที่ 4- 4 การทลดองถุงแป้ง โดยวางแบบ 2 ถุง | |||
รูปที่ 4- 5 ขณะที่ถุงแป้งดูดเข้าเครื่อง
ปัญหาที่พบในการทดลอง
- มอเตอร์กระแสตรงที่ใช้ขับเคลื่อนสายพานและมอเตอร์ที่ใช้ขับเคลื่อนลูกกลิ้งลำเลี้ยง มีความเร็วที่ไม่สอดคล้องกัน ทำให้ผลของการดูด มีถุงแป้งบางถุงที่ได้รับความเสียหาย
- ตำแหน่งที่วางถุง อาจมีความคลาดเคลื่อน ส่งผลให้ดูดถุงแป้งไม่เข้า
บทที่ 5
สรุปผลการทดลอง
สรุป
จากการทดลองการดูดถุง ตามแบบชิ้นที่งานที่ได้ออกแบบไว้ โดยการใช้ลีดสกรูเป็นตัวเคลื่อนที่ไปข้างหน้าและถอยหลังตามระยะเวลาที่กำหนดแล้วใช้ลูกกลิ้งลำเลียงเป็นตัวดูดถุงเข้ามาและมีสายพานลำเลียงเป็นตัวรองรับ ในการทดลองครั้งนี้จะใช้ถุงแป้งข้าวจ้าว เป็นตัวทำการทดลอง
ผลการทดลองที่ได้ คือ ถุงแป้งสามารถดูดเข้ามาได้โดยที่ถุงไม่เกิดความเสียหาย แต่อาจมีความคลาดเคลื่อนในขั้นตอนการวางถุงถ้าตำแหน่งการวางถุงไม่ตรง อาจทำให้ขณะที่ลูกกลิ้งดูดถุงเข้าไปทำให้ถุงได้รับความเสียหาย และฉีกขาดได้
ข้อเสนอแนะ
การเปลี่ยนมอเตอร์ไฟฟ้ากระแสตรงที่ใช้ขับเคลื่อนสายพานลำเลียงให้มีความเร็วที่สอดคล้องกันกับมอเตอร์กระแสตรงที่ใช้หมุนตัวลูกกลิ้งจะทำให้การดูดมีคความสมูท(Smooth) ราบรื่นมากยิ่งขึ้น เพื่อลดความเสี่ยงในการทำให้ถุงหรือสินค้าได้รับความเสียหาย
บรรณานุกรม
●aimagin Blogspot ( 2557).การขับ Step Motor และ RC Servo Motor(ออนไลน์).สืบค้นมาจาก: http://aimagin.com/blog/driving-step-motor-and-rc-servo-motor/?lang=th
●มหาวิทยาลัยเชียงใหม่.ระบบสายพานลําเลียง(ออนไลน์).สืบค้นมาจาก: http://archive.lib.cmu.ac.th/full/T/2552/enme0952bt_ch2.pdf
●ชญาภา นิ่มสุวรรณ(2556).สายพานลำเลียง(ออนไลน์).สืบค้นมาจาก: http://www.mahidolrubber.org/files/technicalsheet/conveyor.pdf
●มหาวิทยาลัยราชภัฏรำไพพรรณี.แรง มวล และน้ำหนัก(ออนไลน์).สืบค้นมาจาก: http://www.etheses.rbru.ac.th/pdf-uploads/thesis-177-file06-2016-02-25-15-29-52.pdf
●Magazine online Thai invention(2018).การทำงานของมอเตอร์ไฟฟ้ากระตรงและการใช้งาน.สืบค้นมาจาก: https://www.inventor.in.th/home/Y
●เอกสารออนไลน์.การถ่ายทอดกำลัง.สืบค้นมาจาก:http://www.eng.kps.ku.ac.th/dblibv2/fileupload/project_IdDoc260_IdPro647.pdf
●เอกสารออนไลน์.ทฤษฎีด้านแบริ่ง(ออนไลน์).สืบค้นมาจาก: http://www.research-system.siam.edu/images/coop/printing_engineer/3_2557/RESTORATION_PROJECTS_GLUING_CORRUGATED_CARDBOARD_MACHINE/07_ch2.pdf
●อะไหล่รถเกี่ยวนวดข้าว อุปกรณ์ไฮดรอลิค คอนโทรลวาล์ว อะไหล่ปั้มไดกิ้น(2015).ทฤษฎีตลับลูกปืน(ออนไลน์).สืบค้นมาจาก: https://www.partsdd.com/15198395/%E0%B9%81%E0%B8%9A%E0%B9%88%E0%B8%87%E0%B8%9B%E0%B8%B1%E0%B8%99%E0%B8%84%E0%B8%A7%E0%B8%B2%E0%B8%A1%E0%B8%A3%E0%B8%B9%E0%B9%89
●NgThai(2020).แรงเสียดทาน(ออนไลน์).สืบค้นมาจาก: https://ngthai.com/science/27846/friction/
ภาคผนวก ก
การออกแบบอุปกรณ์ที่ใช้ในการทดลอง
- ออกแบบโครงของตัวเครื่องดูดถุงและสายพาน
รูปที่ ก 2 ขนาดสายพานและตัวโครงของเครื่อง TOP VIEW
- ลูกกลิ้งลำเลียงที่ใช้ดูดดถุง
รูปที่ ก 5 ลูกกลิ้งลำเลียง
ภาคผนวก ข
โปรแกรมควบคุมการทำงานของ ลีดสกรู(lead screw)
int Distance = 0; // Record the number of steps we’ve taken void setup() {
void setup(){
pinMode(8, OUTPUT);
pinMode(9, OUTPUT);
digitalWrite(8, LOW);
digitalWrite(9, LOW);
}
void loop() {
digitalWrite(8, HIGH);
delayMicroseconds(50);
digitalWrite(8, LOW);
delayMicroseconds(50);
Distance = Distance + 1; // record this step // Check to see if we are at the end of our move
// two rotation for 1/8 bridge and 1 rotation for 1/6 bridge (for this code)
if (Distance == 15000) { // We are! Reverse direction (invert DIR signal)
delay(6000);
if (digitalRead(9) == LOW) {
digitalWrite(9, HIGH); }
else {
digitalWrite(9, LOW);
} // Reset our distance back to zero since we’re // starting a new move
Distance = 0; // Now pause for half a second delay(500);
}
}
ผู้ช่วยศาสตราจารย์ ดร.กิตติพงษ์ เยาวาจา หัวหน้ากลุ่มวิจัยวิทยาการหุ่นยนต์และระบบอัตโนมัติขั้นสูง และผู้รับผิดชอบหลักสูตรหุ่นยนต์และระบบอัตโนมัติ (นานาชาติ) ม.เกษตรศาสตร์ วิทยาเขตศรีราชา คณะวิศวกรรมศาสตร์ศรีราชา